Robô PIC

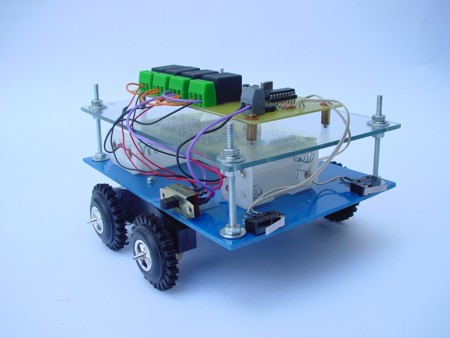
Aproveitando o chassi do Robô IR (Infra Vermelho), criei o robô PIC. Trata-se um robô bem simples. Suas características aproximam-se muito do ADR-1: andar sempre a frente, desviando dos obstáculos ao tocá-los.
Toda a parte mecânica foi desenvolvida em plástico, aproveitado de "pranchetas" compradas em papelaria. Uma outra novidade é o reaproveitamento de caixas de redução retiradas de brinquedos baratos (cada carrinho custou R$5,00). A placa drive utilizada no Robô IR foi substituida por relés. Este tipo de controle é mais simples e o arranjo dado permite utilizar a placa para "outros fins" como:
- controle para casa inteligente
- central de segurança (alarme)
- e outras
Clique para ampliar
 |
 |
 |
O "cérebro" do Robô PIC é um microcontrolador PIC16F84A da Microchip. O programa foi desenvolvido em ASSEMBLY. Tudo muito simples e funcional.
COMO
FUNCIONA O ROBÔ
Meu pequeno robô PIC utiliza relés para controlar dois pequenos motores para sua movimentação e duas chaves como bumper’s (sensores de contato) para realizar o desvio dos obstáculos. A lógica é bem simples e foi escolhida por facilitar o entendimento da aplicação do microcontrolador PIC como “cérebro” de um pequeno robô ( o primeiro utilizando um microcontrolador PIC e Linguagem Assembly).
O robô sempre se move para frente. Ao encontrar um obstáculo ele realiza um desvio, primeiro retrocedendo para ter espaço para o movimento e depois realizando um desvio para o lado contrário ao toque (chave). Tudo bem simples, mas bastante funcional.
O CIRCUITO
Na figura abaixo você tem o circuito elétrico da placa de controle do Robô PIC. É possível ver o PIC16F84A como “cérebro” do circuito e ligado a este, duas pequenas chaves (S2 e S1), utilizadas como sensores de contatos, além de quatro relés (RL1 a RL4) que realizam o controle sobre os motores.
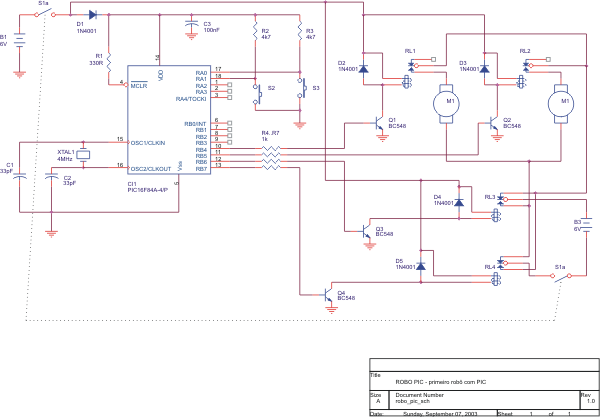
Os relés RL1 e RL2 executam o “ligar/desligar” dos motores do robô. Os relés RL3 e RL4 realizam a inversão da polaridade da alimentação dos motores, permitindo assim a reversão dos mesmos.
Para a alimentação do circuito optei por dois conjuntos de pilhas independentes, um para o microcontrolador e outro para os motores, para isolar o máximo possível o circuito dos motores, evitando possíveis interferências geradas pelos mesmos.
O diodo D1, presente no circuito, abaixa a tensão de alimentação das quatro pilhas de 6VDC para 5,3VDc aproximadamente (uma queda de 0,7V), pois o microcontrolador PIC trabalha com uma tensão de alimentação de 5DC +/- 10%.
DICAS PARA MONTAGEM
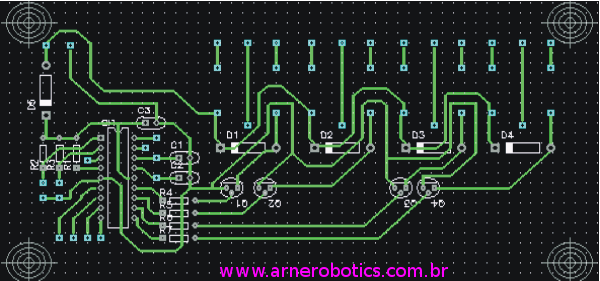
Eu projetei e montei este robô há alguns anos e na época eu utiliza outros programas, que não uso mais, para realizar desenhos de lay-out e circuitos eletrônicos. Hoje uso Eagle/Linux. Tudo o que restou foram algumas imagens, mas que creio, irão ajudar. Caso você se interesse em montar este robô, poderá usar o lay-out que desenvolvi como referência ou ainda, fazer o seu próprio. O uso do desenho abaixo também é possível. Porém devo alertar que o mesmo esta totalmente fora de escala. Para utilizá-lo, você terá de imprimir uma cópia e colocar um PIC sobre a mesma. A partir dai é só recalcular a escala e imprimir novamente até obter o tamanho desejado.
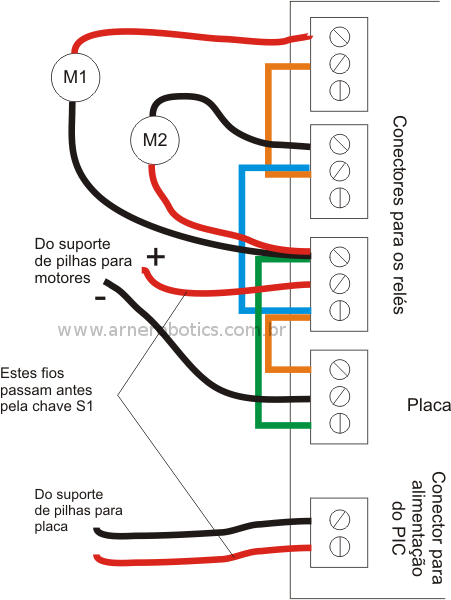
Sobre a conexão dos relés aos motores, a figura abaixo mostra em detalhes como fiz isso. Espero que esta ajude também na compreenção do esquema elétrico.
O PROGRAMA
Na figura abaixo é possível ver o fluxograma do programa e acompanhando o código fonte do mesmo será possível entender seu funcionamento. O programa foi extensamente comentado para facilitar a sua compreensão.
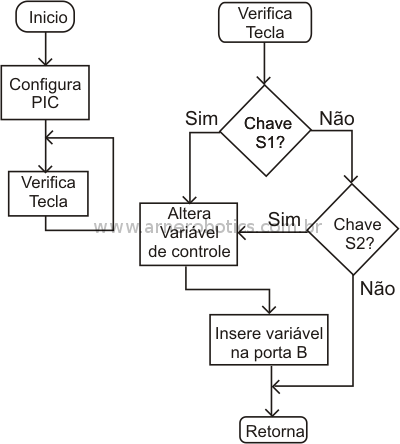
O programa inicia as diretrizes de pré-compilação e suas variáveis. Em seguida o microcontrolador é configurado (direção dos pinos, interrupções, etc). Na rotina “LOOP” o programa realiza a leitura dos bumper's. Se qualquer um deles for pressionado, a variável de controle é alterada e em seguida será inserida na parte mais significativa da porta B. Esta variável de controle é que determina qual a direção será tomada pelo robô. A tabela abaixo descreve como isso é feito.
Tabela - Valores possíveis para a variável de controle
|
Valor binário na porta B |
Efeito nos motores |
Direção do robô |
|
0011XXXX |
Motores M1 e M2 ligados. |
Para frente |
|
1111XXXX |
Motores M1 e M2 ligados invertidos |
Para trás |
|
1101XXXX |
Motor M1 ligado invertido, motor M2 desligado |
Deslocamento para trás, à esquerda |
|
1110XXXX |
Motor M1 desligado, motor M2 ligado invertido |
Deslocamento para trás, à direita |
|
XX00XXXX |
Motores M1 e M2 desligados |
Robô Parado |
Obs.: O “X” na tabela representa "valor irrelevante" (tanto faz se “0” ou “1”).
Assim, quando um bumper for pressionado o robô pode realizar o movimento necessário.
DONWLOADS:
-
Circuito elétrico
- Lay-out do circuito
impresso (versão original - Setembro/2003)
- Esquema para conexão
dos relés
- Programa
LISTA DE
MATERIAIS:
|
Semicondutores CI1 –
PIC16F84A-04/P Microchip
Resistores R1 –
330R (laranja, laranja, marrom)
Capacitores C1 –
100nF – cerâmico
Diversos S1 –
Chave liga/desliga “H-H” dupla |
 |
Este projeto foi publicado, com minha autorização, na Revista Mecatrônica Fácil nº 13 de Novembro/Dezembro de 2003. Especificações: - Cérebro - PIC16F84A - 4MHz |