Braço mecânico 1 (BM-1)
 |
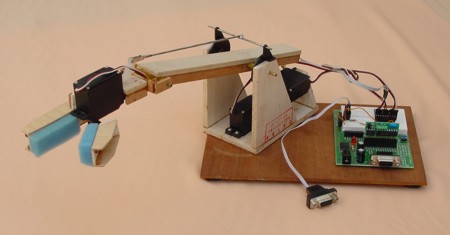 |
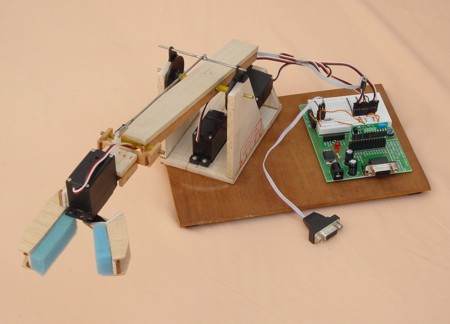
Braços mecânicos ou robôs manipuladores (... como alguns preferem chamar) despertam muita atenção e interesse por parte dos amantes da mecatrônica. Em 1991, montei meu primeiro braço mecânico publicado na revista Saber Eletrônica número 215 de dezembro de 1990, um projeto de Marco Antonio Marques de Souza.
O BM-1, como o batizei, tem "2 graus de liberdade" e utiliza três servos para aeromodelos Futaba S-3003 . O controle é feito via PC, através do canal serial (RS-232) e para receber os dados no robô utilizei um Basic Step 1, da Tato Equipamentos Eletrônicos.
As partes mecânicas foram costruídas em madeira. Este tipo de material não é bem visto pela maioria dos amantes da robótica. Porém posso dizer que a madeira é muito fácil de se trabalhar, tem boa rigidez mecânica (se comparada a outros materiais como, por exemplo, plástico), excelente peso (é leve) e permite um excelente acabamento (é fácil de pintar, adesivar, etc). Não quero iniciar aqui uma discussão sobre "materiais ideais para robótica". Desejo apenas expor mais uma dica: "madeira sim e sem preconceito!".
CIRCUITO DE CONTROLE
Os movimentos do BM-1 são controlados por três servos Futaba (tipo standard), utilizados em aeromodelismo. Na figura abaixo é dado o circuito elétrico (controle) do BM-1. Para controlar os servos utilizei um Basic Step 1, que se comunica com um PC através de uma porta serial RS-232.
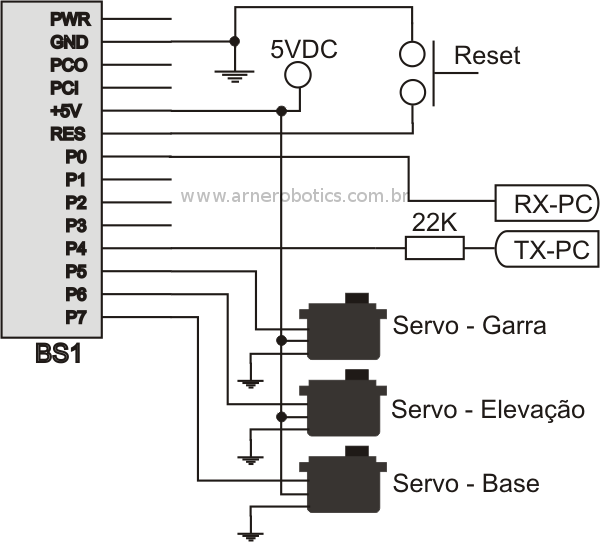
Conforme pode-se observar na figura abaixo, o Basic Step recebe os dados, conforme um protocolo, através da porta serial, decodifica-os e os transfere para os servos. Isso é "convertido" em movimento no braço mecânico. Estes dados são enviados para o Basic Step através da Linguagem LOGO, que pode ser obtida gratuitamente através do site http://www.nied.unicamp.br. Se você possui alguma experiência em programação poderá, se desejar, desenvolver seu próprio programa de controle em outra Linguagem de Programação , de acordo com suas necessidades e conhecimentos.
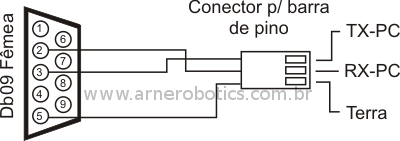
O servo da base do braço foi ligado ao pino de I/O P7, o servo de elevação ao pino P6 e o servo da garra ao pino P5 do Basic Step 1. A comunicação Rs-232 foi ligada através dos pinos P0 e P4. Para interligar a placa Step LAB ao PC, utilizei um cabo de gravação fornecido com a placa. Porém precisei providenciar um pequeno “adaptador”, conforme figura abaixo, para conectar o PC ao pront-o-board da placa, pois o conector DB09 presente na mesma serve apenas para gravação do Basic Step 1.
PARTES
MECÂNICAS
As peças mecânicas foram construídas a partir de material de “sucata” (alternativos), aproveitadas da minha oficina. A maioria foi desenvolvida a partir de madeira balsa, que permite um bom acabamento e é muito fácil de se trabalhar, além de ser barata. Utilizei também alguns tubos plásticos, tubos de latão, espuma, peças para aeromodelos, parafusos, cola, etc.
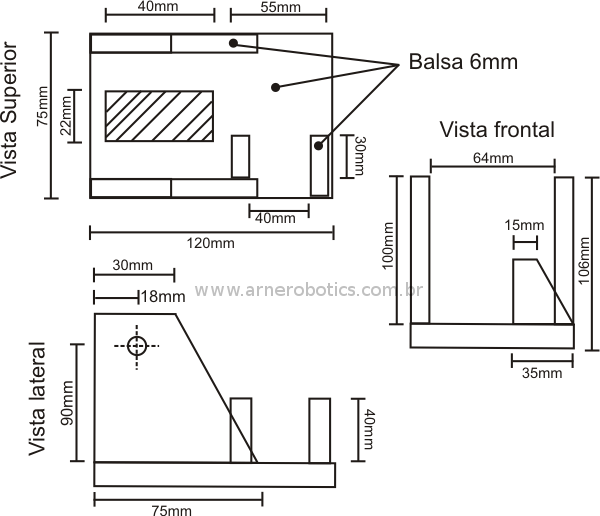
Base móvel
A base móvel foi montada com madeira balsa de ¼ de polegada (6mm) de espessura. O esquema da base pode ser visto na figura abaixo. Para realizar as furações e cortes, utilizei um estilete, serra fina e uma pequena furadeira. A balsa é uma madeira macia e o trabalho com a mesma foi bem simples. Caso você não tenha experiência no uso de estiletes, serras e furadeiras deverá pedir a ajuda a uma pessoa mais experiente. A união das partes foi feita com cola tipo epóxi.
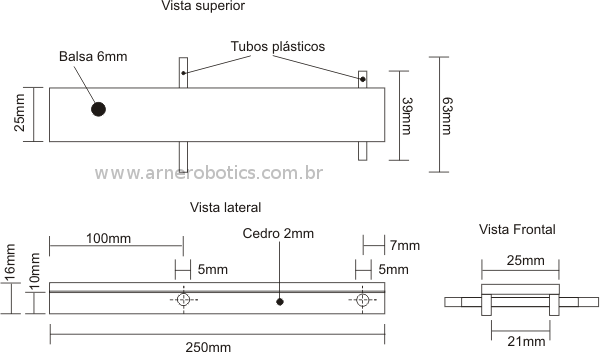
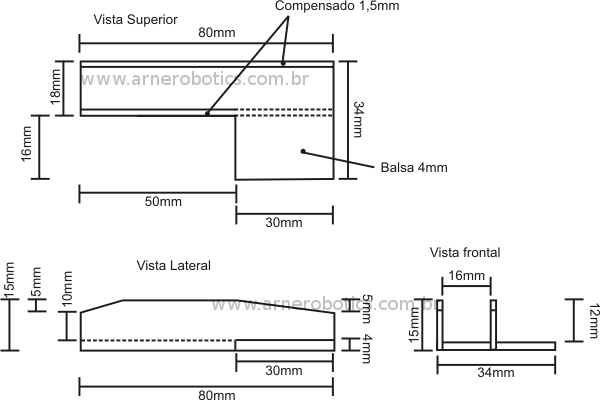
Braço
O braço foi montado utilizando madeira balsa 6mm de espessura e cedro 2mm de espessura com 10 mm de largura. Na figura abaixo demonstro o esquema do braço. Os tubos plásticos utilizados nas juntas podem ser aproveitados de canetas sem carga ou outros. Em lojas de aeromodelismo é possível encontrar tubos deste tipo com o nome de push-rods. Aqui também utilizei cola tipo epóxi para a fixação das peças. Na extremidade menor do braço, colei um pequeno ponto de apoio, aproveitado de um link de servo para aeromodelo. Este ponto será utilizado pelo servo de elevação.
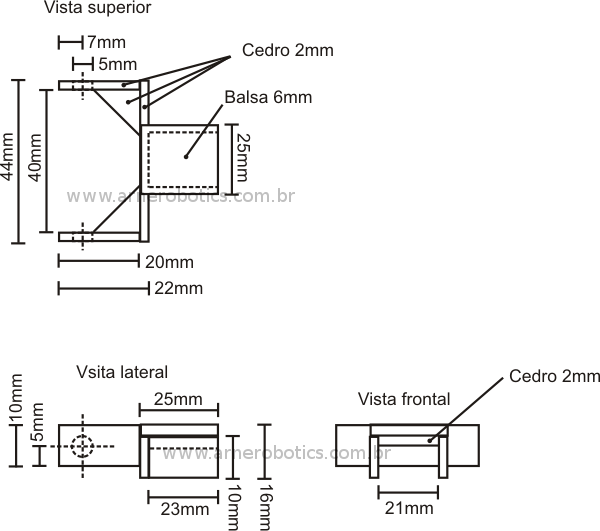
Punho
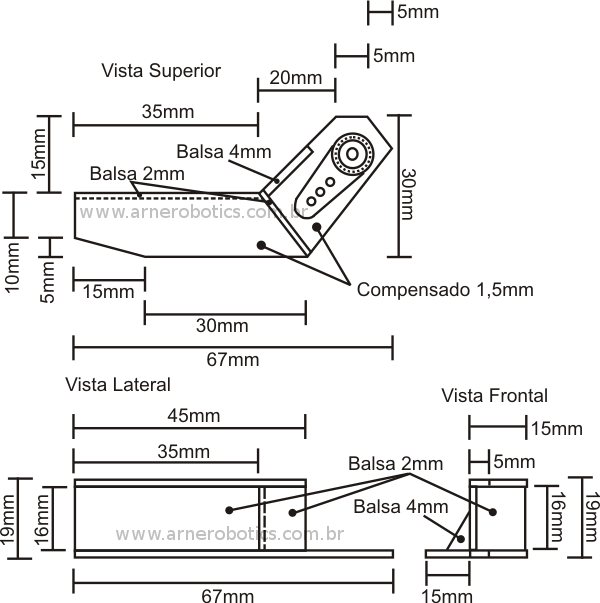
O punho foi montado com cedro 2mm de espessura com 10mm de largura, além de retalhos de balsa com 6 mm de espessura. O esquema do mesmo pode ser visto na figura abaixo. Utilizei cola epóxi também para a montagem deste. No alto, no centro do punho, instalei um horn para aeromodelos colado com cianocrilato (Super Bonder). Este horn será utilizado pelo “controle mecânico do punho”.
Garra
A garra foi montada com madeira compensado de 1,5mm de espessura e retalhos de balsa com 2 e 4mm de espessura. Nas figuras abaixo você tem o esquema de montagem da garra, parte móvel e fixa. Para a montagem da garra, você poderá optar por utilizar cola epóxi ou mesmo cianocrilato (Super Bonder). Eu usei epoxi.
Base fixa
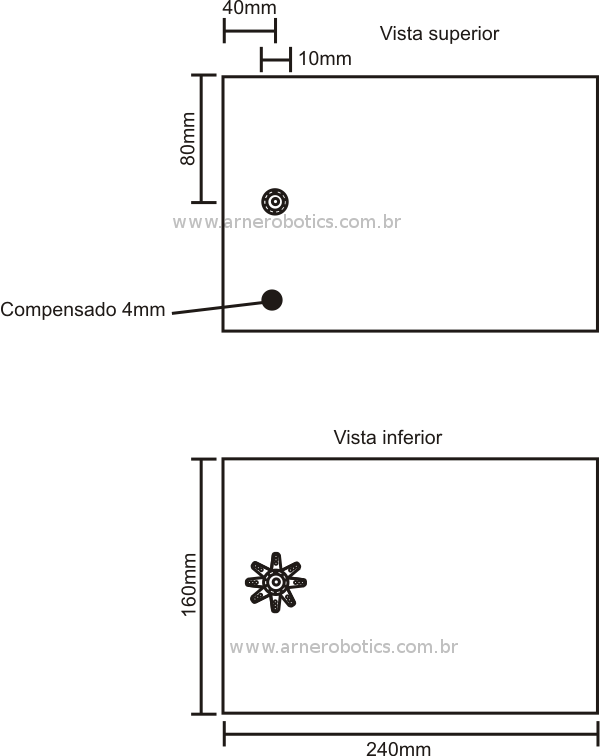
Esta base segura todo o conjunto e foi preparada a partir de um pedaço de compensado com 4mm de espessura, 160mm de largura e 240mm de comprimento. Ela recebeu apenas um furo, para a inserção de um link de servo na parte de baixo da mesma.
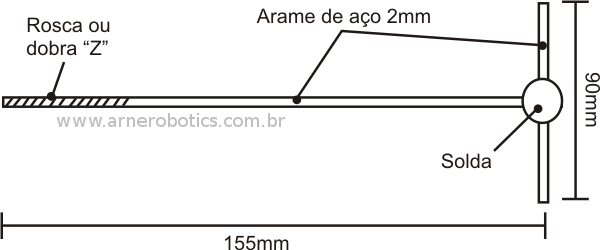
Tendão
Como o robô tem apenas dois graus de movimento, o movimento do punho é garantido através de um tendão fixo, que garante que o punho fique sempre paralelo a base fixa. Este tendão foi montado com arame de aço utilizado na "lincagem" de aeromodelos. Veja a figura abaixo.
PROGRAMAS
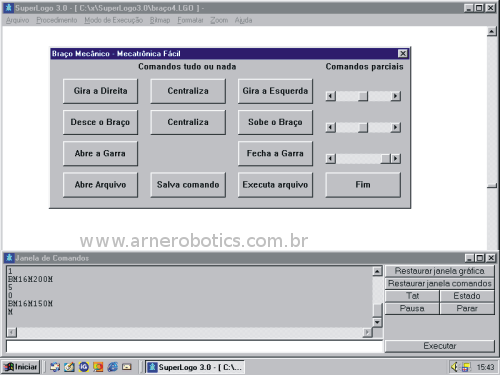
Este robô precisa de dois programas. Um deve ser gravado no microcontrolador Basic Step 1 e o outro instalado no PC, para ser executado com o SuperLogo.
No programa para o Basic Step eu chamo a atenção para a solução dada a falta de uma interrupção para a recepção de um caracter via RS-232. Essa falta não chega a ser um "defeito" no Basic Step, afinal toda transmissão ou recepção via RS-232 no mesmo é feita via software e não via hardware (por isso pode ser feita em qualquer pino), e sendo assim, tal implementação seria inviável.
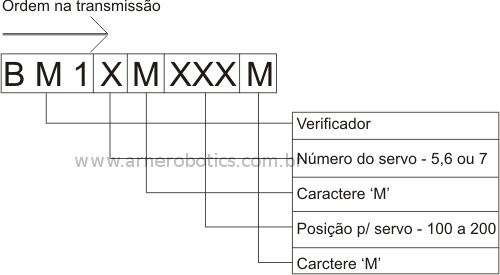
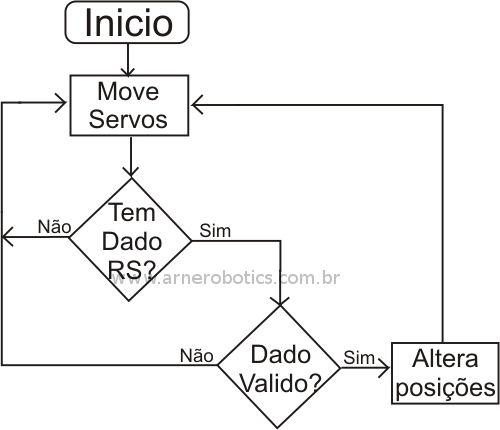
Como o programa precisa manter os pulsos constantes para os servos (sem isso os mesmos ficariam sem nenhum torque) e ao mesmo tempo aguardar um dado do canal serial, a solução foi observar a mudança de estado (nível) no pino RX. Quando isso acontece, o programa pára momentaneamente a operação com os servos e começa a receber os dados, para então alterar as posições dos servos, conforme protocolo. Por isso o programa de controle no PC, quando deseja enviar um dado ao robô, envia constantemente um caracter para "chamar a atenção" do Basic Step. Quando esta atenção é conseguida, o programa de controle recebe um caracter de prontidão do Basic Step e então, envia o comando (seguindo protocolo).
Esta solução funcionou bem e provou que mesmo sem um interrupção, o Basic Step 1 é um bom microcontrolador para este tipo de projeto. A figura abaixo mostra o fluxograma do mesmo.
Somente com o estudo de ambos os programas é que você compreenderá como o conjunto funciona realmente.
DONWLOADS:
- Programa para gravar o
Basic Step 1
- Programa de controle no
SuperLogo
- Lista de materiais (veja no circuito elétrico e
desenho das partes mecânicas)

Este projeto foi publicado, com minha autorização, na Revista Mecatrônica Fácil nº 07 de novembro/dezembro de 2002 com o nome de "Robô Manipulador" (... enjoado!!!).
Especificações:
- Cérebro - compartilhado: Basic Step I e Micro-computador PC
- Motores - 3 servos: 1 p/ base, 1 p/ elevação e 1 p/ garra.
- Sensores - nenhum
- Alimentação- fonte 12V 1000mA
- Chassi - madeira e peças de aeromodelos (salada!!!)
- Programa - TBasic Tato (Basic Step) e Super Logo (PC)