ROBÔ ADR1R (Revisado)
 |
|
E foi o que fiz nessa nova versão! E de quebra ainda juntei ao "pacote" outras paixões minhas: os retrocomputadores (em especial a linha MSX) e impressão 3D!!!
A montagem é simples, sem componentes complexos ou difícieis de se encontrar, mas garanto que será bastante prazerosa (pelo menos assim foi para mim). Sendo assim meu caro amigo, prepare-se para o que vou detalhar a seguir. ;)
O QUE MUDOU?
A tabela abaixo mosta as principais características entre ambos os robôs:
| Robô ADR1 |
Robô ADR1R |
|
| Controle |
- Basic Stamp 1 | -
Arduino Micro |
| Motores | - 2 Servos de Rotação | - 2 Servos de Rotação |
| Sensores | -
Bumper de colisão via "chaves" |
-
Sensor IR Sharp |
| Alimentação |
-
1 bateria 9V + 4 pilhas pequenas AA |
-
1 bateria Lipo 3S 700mA/H + 2 baterias Lipo 2S
610mA/H |
| Chassi |
-
Madeira |
-
ABS (impressão 3D) |
| Controles extras |
-
Nenhum |
-
Controle RF 433mHz via MSX |
O primeiro robô ADR1 foi montado usando basicamente dois servos de aeromodelo adaptados para rotação e um BASIC STAMP 1 Parallax (uma espécie de Arduino, porém bem mais antigo - lançado em meados da década de 1990 - Eu comprei o meu em 1996!) e outras poucas peças (se quiser saber mais sobre a primeira versão do ADR1, clique aqui).
Nessa versão "revisada" resolvi manter os servos de rotação, mas troquei o BASIC STAMP 1 por um Arduino Micro (para ficar mais atual), mudei os "bumpers" (sensores de toque) por um sensor IR da Sharp e também inseri a possibilidade do controle "externo" através de um pequeno computador "retro" (um MSX, mas pode ser adaptado para qualquer outro claro!) ou mesmo moderno usando para isso um simples par transmissor/receptor RF de 315/433MHz em conjunto com um par "encoder/decoder".
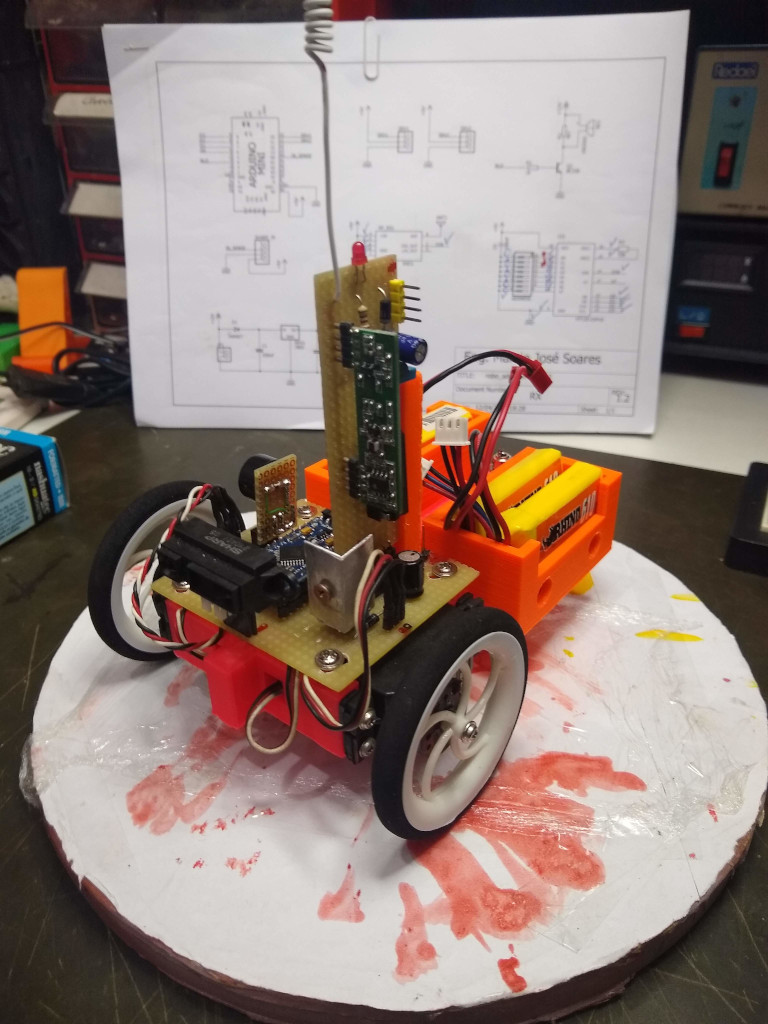
O chassi, que na primeira versão foi montado com madeira, nessa nova versão foi impresso em uma impressora 3D (veja as imagens abaixo). As baterias utilizadas nessa nova versão também são diferentes e agora são de "Lipo" o que permite que sejam recarregadas!!!


O CICUITO DO ROBÔ
Na figura abaixo você tem o esquema eletrônico do robô. Note que ele é bem simples. O "cérebro" é um Arduino Micro com um ATMEGA328 5VDC 16MHz. RF_RX1 é um receptor RF com modulação AM ASK muito comum no mercado especializado. A saída digital deste módulo foi ligada a CI3, que é um decoder HT12D HOLTEK, responsável pela validação e decodificação do sinal recebido.
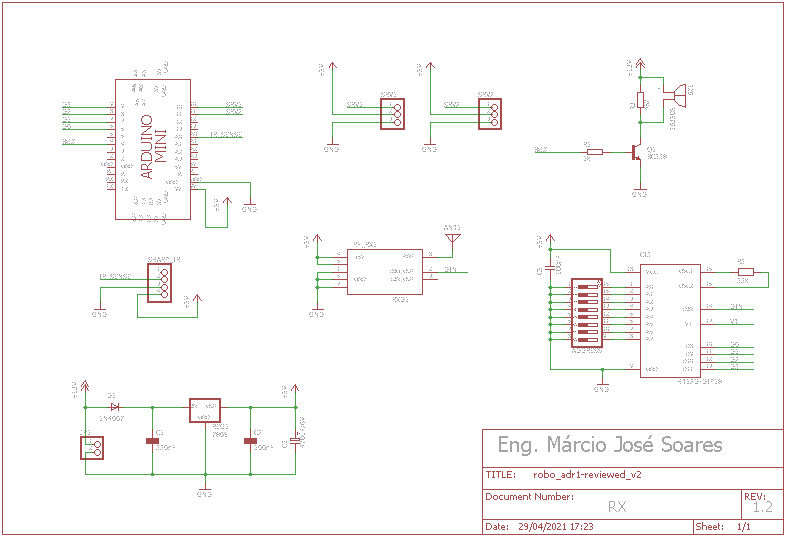
Quando o receptor capta um sinal, este é automaticamente inserido no decoder e este tentará a decodificação da parte do endereço A0 a A7, de acordo com a chave DIP ADDRESS. Com uma chave em ON, tem-se GND ligado ao pino e conseqüentemente “0” lógico no mesmo. Se aberta, o pino será ligado ao VCC através de um resistor de pull-up interno, e desta forma tem-se “1” lógico no pino. A seleção nesta chave deve ser feita de maneira que o endereçamento seja o mesmo usado nos jumpers ADDRESS A0 a A7 do transmissor (a ser demonstrado mais a frente neste artigo).
Se o endereço estiver correto, CI3 ativará momentaneamente seu pino VT (Valid Transmission) ativo de “0” para “1 (Isso poderá ajudar a encontrar uma possível falha de comunicação/conexão entre os módulos TX e RX). Além disso o dado de 4 bits será disponibilizado nas linhas D8 e D11 do CI3 que foram ligadas, respectivamente, aos pinos 6 a 9 do ARDUINO MINI e esse tratará o "dado" recebido (direção que o robô deve tomar).
O resistor R3 foi colocado no circuito para que o oscilador interno de CI3 fique "casado" com seu par HT12E. Não altere esse resistor sem consultar o datasheet do par HT12D/HT12E.
Além do controle temos o sensor SHARP_IR modelo 2Y0A21. A função desse sensor é "ficar de olho" no caminho, impedindo que o robô seja levado pelo controlador a uma colisão indesejada. Assim o Arduino realiza uma medida dos obstáculos a frente e quando este se encontrar a 10cm ou menos, um desvio automático será realizado.
O circuito também possui um buzzer que será sempre acionado quando for realizado um desvio. Seu controle é feito pelo transistor Q1, um BC338, mas qualquer NPN de uso geral pode ser utilizado aqui. O resistor R1 é o limitador de corrente para Q1 e R2 serve como carga no coletor para Q1, equilibrando a corrente. Note que o buzzer está ligado a entrada de tensão do circuito, 12VDC.
Para a alimentação do circuito eu selecionei uma bateria Lipo 3S (3 células) de 700mAH para os motores, Arduino e o sensor. Essa bateria totalmente carregada oferece 12,6V aproximadamente. O diodo D1 foi colocado na entrada de tensão do circuito para prevenir possíveis inversões ao conectar a bateria. Reg1 é um regulador de 5V 7805 TO-220 com dissipador (meus servos são bem fominhas!). C1, C2 e C3 são capacitores de filtros.
Um segundo conjunto de bateriais pode ser visto nas imagens. Esse segundo conjunto é um par de baterias Lipo 2S 600mAH ligados em série para alimentar apenas o HT12D e receptor RF (um segundo regulador 78L05 está presente na segunda placa). Fiz dessa forma porque montei duas placas já que na verdade o robô foi acontecendo aos poucos e também devido a "fome" dos servos utilizados (rsrsrs).
SRV1 e SRV2 são servos de rotação. No meu caso usei dois antigos Futaba FP148 que tenho comigo há muito tempo e que eu mesmo adaptei. Mas isso é fácil de se encontrar pronto hoje em dia no mercado especializado.
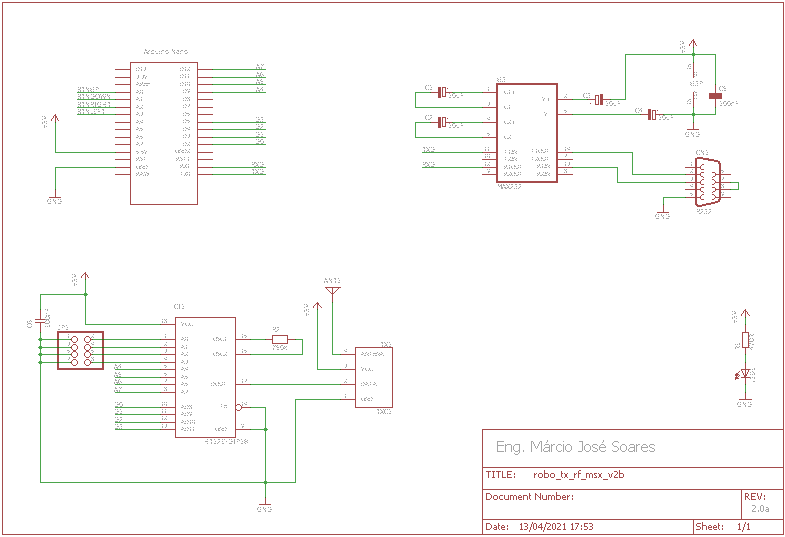
O CIRCUITO DO TRANSMISSOR (MSX)
Na figura abaixo é dado o circuito eletrônico do transmissor. Basicamente temos duas partes: codificação (CI1) e transmissão (TXC1). CI1 é um encoder HT12E da HOLTEK. Este CI permite a codificação da informação em até 212 combinações. No circuito, através de ADDRESS é possível ligar as linhas A0 a A3 ao GND. Se a ligação ficar “aberta” a linha será ligada ao VCC através de resistores de pull-up internos. Ou seja, se o jumper não for fechado, tem-se “1” lógico no pino e se for fechado, “0” lógico. As linhas A4 a A7 são utilizadas para, juntamente com A0 e A3, formar o endereço e as linhas AD8 e AD11 são utilizadas para dados.
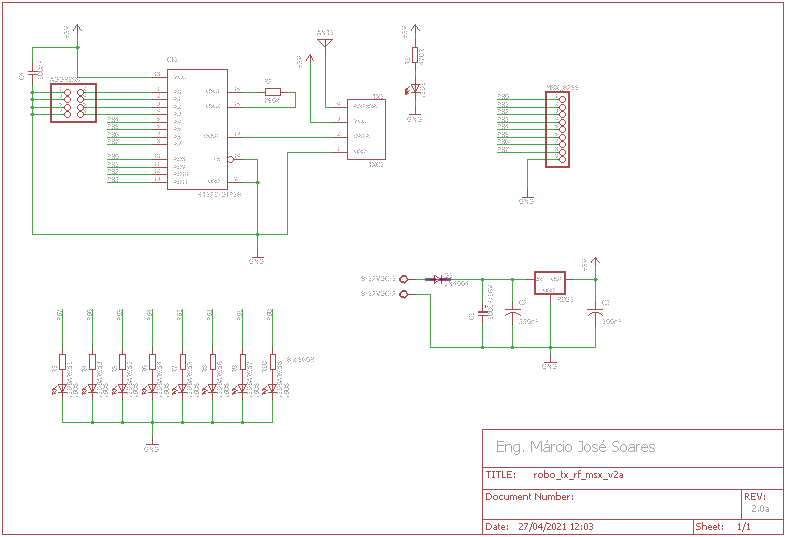
As linhas A4 a A7 foram conectadas respectivamente ao pinos PB4 a PB7 da Placa Projeto Hardware. Estas linhas complementam o endereço a ser enviado para o HT12D. Dessa forma é possível, sem qualquer alteração interna no hardware controlar 16 dispositivos para cada conjunto de 16 endereços configuráveis via chave ADDRESS.
Já as linhas AD8 e AD11 foram conectadas respectivamente aos pinos PB0 a PB3 também da mesma placa (lembra a ideia é usar o MSX no controle desse robô, mas você pode substituir o mesmo por qualquer outro, até mesmo um Arduino!). Dessa forma o MSX fica responsável pelo controle dos dados e de parte do endereço!
O LED1 indica alimentação presente e LEDBARG é uma barra com 8 LEDs usada apenas para informação ao usuário (nibble MSB do endereço e dados).
O resistor R2 é muito importante no circuito! O mesmo não deve ser alterado, já que seu valor permite que o oscilador interno trabalhe de forma adequada, permitindo que o mesmo se comunique perfeitamente com o seu par, o HT12D. Não altere esse resistor sem consultar o datasheet do par HT12D/HT12E.
Para alimentação desse circuito escolhi utilizar uma fonte externa de 9VDC. O diodo D1 está presente para evitar um problema maior caso ocorra uma inversão na conexão da fonte no circuito (nem pensar colocar em risco meu MSX!). REG1 é um regulador 78L05. C1, C2 e C3 são capacitores de filtro para o regulador e C4 é um capacitor de desacoplamento para CI1.
Obs.: Se você quiser saber mais sobre o par HT12D/HT12E eu sugiro o estudo dos respectivos datasheets. Muita informação poderá ser encontrada nos mesmos.
MONTAGEM DO ROBÔ
Eu optei por montar o circuito do robô usando duas placas padrão separadas, mas nada impede que você o faça de outra maneira. Isso ficará por sua conta ok!
Sugiro apenas utilizar barra de pinos fêmea para conexão do Arduino ao circuito e um suporte de CI para CI3. Além disso seria interessante utilizar também barra de pinos para o módulo de RF, servos e o sensor. Dessa forma você pode reutilizar facilmente estes componentes em outros circuitos/ideias.
Lembre-se que os componentes indicados com D1, Q1, C3, CI3, RF_RX1, SHARP_IR, REG1 e ARDUINO MINI são polarizados ok. Muito cuidado ao montá-los!
Como antena eu usei um pequeno pedaço de fio que pode ser facilmente calculo com a fórmula abaixo:
Comprimento da antena = 7500/Frequência em
MHz [cm]
dessa forma temos:
Comprimento da antena =
7500 / 315Mhz = 23,8cm
MONTAGEM DO TRANSMISSOR (MSX)
Na figura abaixo eu apresento o layout de circuito impresso do meu protótipo (apenas sugestão ok, afinal você pode desenhar o seu se assim preferir). Recomendo o uso de um suporte para CI1 e o uso de barra de pinos fêmea para TXC1. Aqui também deve-se tomar cuidado ao montar os componentes polarizados.
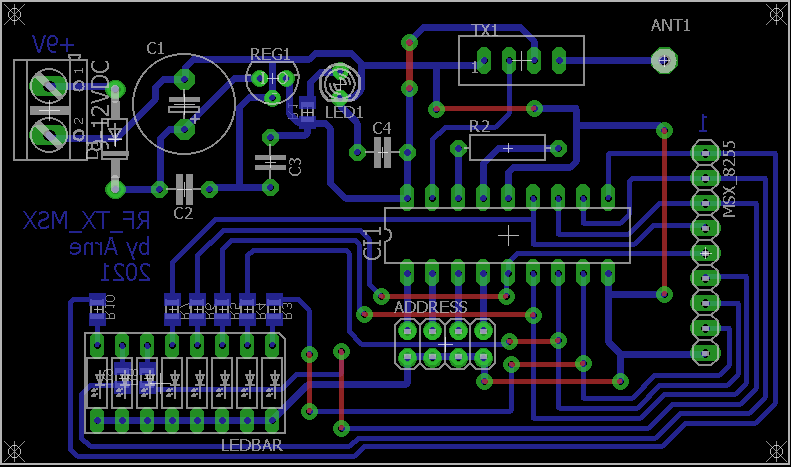
Obs.: Eu usei nesse layout alguns resistores SMD 0805. É relativamente fácil de encontrar os mesmos e também de soldá-los a placa. Fiz essa opção porque quando preparei a placa estava sem os mesmos no referido valor em PTH! Como eu disse anteriormente, você poderá desenhar o seu próprio layout de circuito impresso para esse projeto.
O PROGRAMA DO ROBÔ
O programa para o robô é também bem simples e pode ser obtido mais abaixo em "DONWLOADS". Ele começa configurando o Arduino (pinos, Servos, sensor Sharp, LED Live, etc) e em seguida entra em um laço principal (você vai perceber que costumo usar um "while" dentro do "loop" do Arduino). No laço principal um período de aproximadamente 2ms é contado. Esse tempo é aproveitado para piscar o LED Live (500ms) e fazer a leitura dos pinos de controle 6 a 9 a cada 250ms. O Arduino trata os pinos reprogramando os tempos dos servos através da biblioteca inserida no inicio do scketch (Servo.h).
Obs.: Recomendo o estudo do programa para a compreensão do mesmo!
O PROGRAMA DO TRANSMISSOR (MSX)
O programa para o MSX foi desenvolvido em ASSEMBLY Z80 com um "loader" em MSX BASIC, mas poderia sem maiores problemas ter sido todo montado em MSX BASIC. É mais uma questão de gosto mesmo.
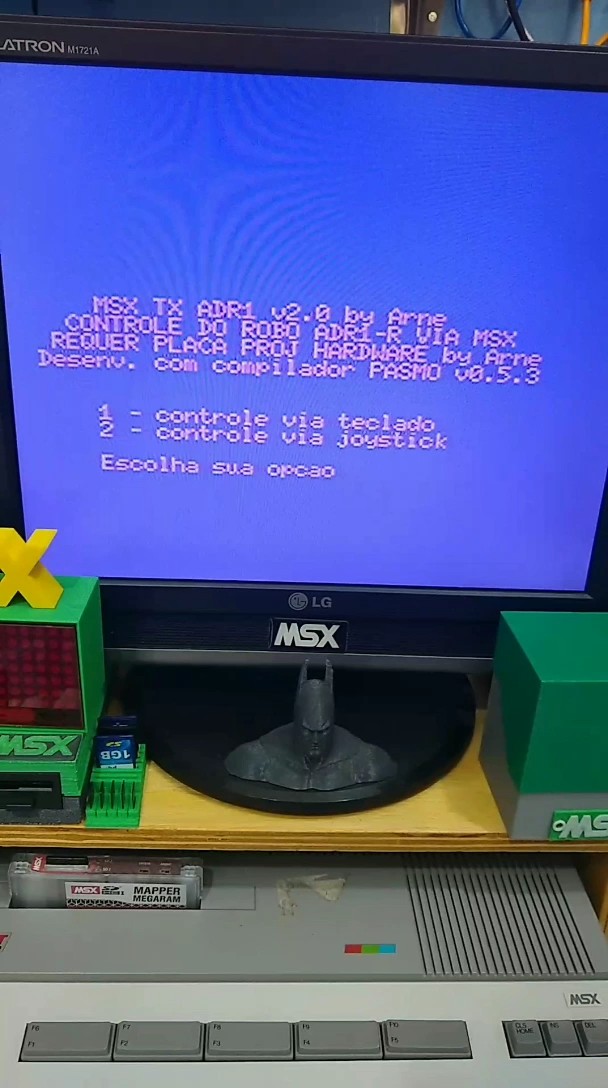
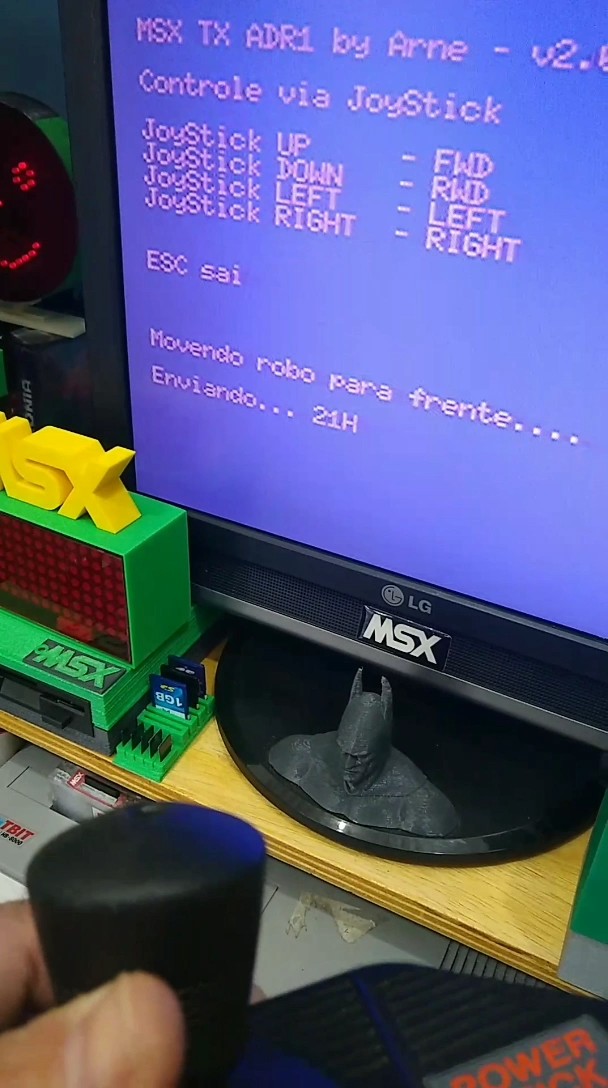
No programa (figuras da tela acima) é possível selecionar o controle via teclado ou joystick (essa segunda opção é a mais legal!). Feita a escolha o mesmo parte para a tela de controle e essa informa as opções válidas e também a condição atual do dado que está sendo enviado e também o estado atual do movimento do robô. Tudo muito simples!!!
AQUELA AJUDA PARA QUEM NÃO TEM UM MSX
Se você não tem um MSX, mas gostaria de testar o robô proposto neste artigo a figura abaixo mostra uma possível solução utilizando um Arduino Nano (pode ser o Uno ou qualquer outro que você tenha em mãos!).
O circuito é bem simples e não deve trazer complicações em sua montagem e pode ainda ser montado numa prot-o-board (matriz de contatos). O link para o scketch está mais abaixo em DOWNLOADS, mas já aviso que eu não testei muito isso ok. Deixo o mesmo apenas como exemplo. Se não funcionar, você terá uma ótima oportunidade de revisar e acertar o código!
CONCLUSÃO
Esta nova versão do robô ADR1 não é tão parecida com a primeira. A ideia para esse robô era manter a simplicidade aproveitando os recursos que eu tinha em mãos, além claro de utilizar um microcomputador "retrô" no controle do mesmo (principal objetivo). E ai está o resultado! Espero que você, de alguma maneira, possa curtir também este projeto. Em breve trarei outros mais e sempre com algum diferencial! Sorte e sucesso em suas montagens/projetos!
Obs.: Se você quiser conhecer outros projetos usando o MSX, veja em "MSX" ou ainda em "Eletrônica & Microcontroladores". Aqui o link para a página inicial do meu site. Divirta-se!!!
Se quiser falar mais a respeito, envie um email para arne_robotics@hotmail.com.
DOWNLOADS
- Circuito eletrônico do robô
- Circuito eletrônico do transmissor MSX - complemento para Placa Projeto Hardware
- Desenho da placa do transmissor MSX - complemento para Placa Projeto Hardware
- Programa (Scketch) para Arduino no Robô
- Programa Binário + Loader em Basic para MSX
- Arquivos STL do chassi do robô (Thingiverse!)
EXTRAS
- Circuito eletrônico do transmissor Arduino
- Exemplo de Scketch para exemplo de controle (transmissor) usando um Arduino