CONTROLE
MAX7219 COM DISPLAYS 7 SEGMENTOS COM PIC
USANDO COMUNICAÇÃO SPI POR SOFTWARE
CONHECENDO O PROTOCOLO SPI - PINOUT E CONEXÃO
O protocolo SPI foi desenvolvido pela Motorola em 1979 (velho?!?!) para permitir a comunicação serial síncrona entre periféricos a curta distância. E quando falo curta distância, estou me referindo a dispositivos instalados em uma mesma placa ou ainda num mesmo "sistema" (caixa).
Ele utiliza a arquitetura mestre/escravo em modo full-duplex, podendo chegar a velocidades superiores a 4Mbit/s. Para isso seu barramento conta com 4 pontos de conexão, a saber:
- - MOSI (Master out, slave in - saída de dados do mestre e entrada para o escravo);
- - MISO (Master in, slave out - entrada de dados para o mestre e saída para o escravo);
- - SCLK (Clock de sincronismo sempre controlado pelo mestre);
- - SS (Slave Select - seleção do escravo).
Por ter um ponto para seleção do escravo, um endereço para o mesmo no barramento é dispensável.
A figura abaixo mostra um barramento típico entre um mestre e seus dispositivos "escravos".
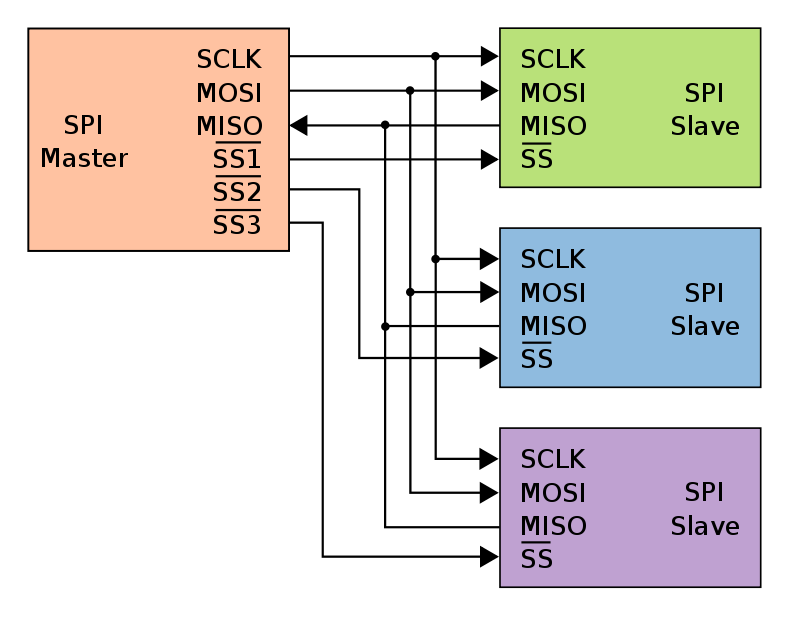
Notem que cada escravo tem o seu próprio pino de seleção, e que os demais pinos (MOSI, MISO e SCLK) estão conectados entre si. Essa poderia ser uma das desvantagens desse protocolo, já que para usarmos 10 dispositivos escravos precisaríamos de 13 pinos de I/O do nosso microcontrolador.
SOBRE POLARIDADE E FASE SPI
O protocolo SPI tem 4 modos de trabalho, que são definidos pela "polaridade" e "fase" do clock em relação aos dados. Veja a figura abaixo.
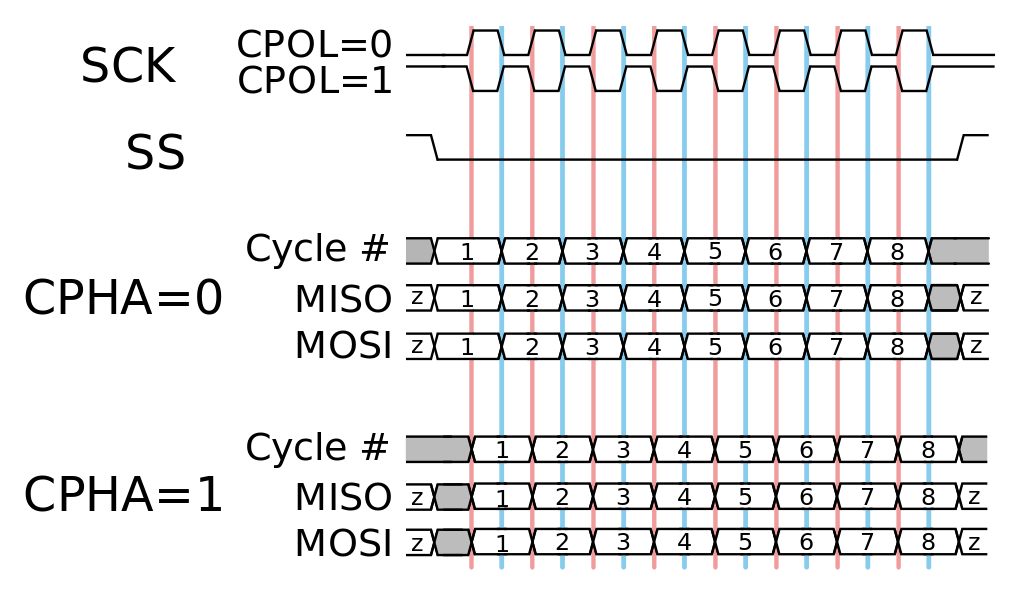
E a tabela abaixo detalha melhor os modos em relação a polaridade e fase.
| SPI Mode |
CPOL |
CPHA |
| 0 |
0 |
0 |
| 1 |
0 |
1 |
| 2 |
1 |
0 |
| 3 |
1 |
1 |
IMPLEMENTAÇÃO SPI POR SOFTWARE
A intenção desse artigo é demonstrar como o protocolo pode ser implementado por software. Acredito que até aqui você deve ter percebido que o protocolo SPI não tem um número finito de bits e nem um número "fixo" para os mesmos. Cada dispositivo tem o seu limite máximo e/ou mínimo e pode ou não possuir registradores para leitura/escrita de dados e/ou configuração.
Obs.: A única observação é que você sempre vai trabalhar com a ideia da leitura/escrita de um ou mais bytes ou seja, com múltiplos de 8 bits, caso o dispositivo não informe o contrário.
Nesse caso, percebe-se então que o SPI é muito, mas muito parecido com um shift-register e sua operação é exatamente a mesma. Tudo o que é preciso fazer é, para um controle por software, selecionar o CI através do seu pino SS e pulsar o clock disponibilizando o bit de dado de acordo com a polaridade e fase escolhidos. Veja o segmento de programa em C abaixo:
Esse pequeno segmento de código acima está configurado para modo 0. O clock é levado a low manualmente, mas apenas porque esse é seu estado natural (veja na saída da função) e em seguida o bit de dado é disponibilizado (0 ou 1) para somente então o bit de clock ser levado a high, momento em que o dispositivo faz a leitura do bit. Agora veja abaixo um segmento de código para leitura de dados:
Este novo
segmento de código trabalha da mesma forma. O clock
é levado a low e nesse momento o escravo deve
disponibilizar o bit (o mestre adiciona um tempo para
aguardar até que o bit de dado possa ser considerado
válido - estável). Em seguida o mestre lê o bit de dado
e levanta o clock (high) aguardando
novamente um tempo e toda a sequencia é repetida até que
todos os bits desejados sejam lidos.
Essas funções
podem ser aplicadas a qualquer microcontrolador da
família PIC usando quaisquer pinos de I/O.
EXEMPLO
PRÁTICO - CONTROLE MÓDULO DISPLAY MAX7219
Abaixo o
esquema para um exemplo prático utilizando um módulo
MAX7219 com 8 displays de 7 segmentos. Há um
vídeo no inicio do artigo que demonstra esse exemplo. O
código fonte está disponível mais abaixo em downloads
e foi ricamente comentado para facilitar o seu
entendimento.
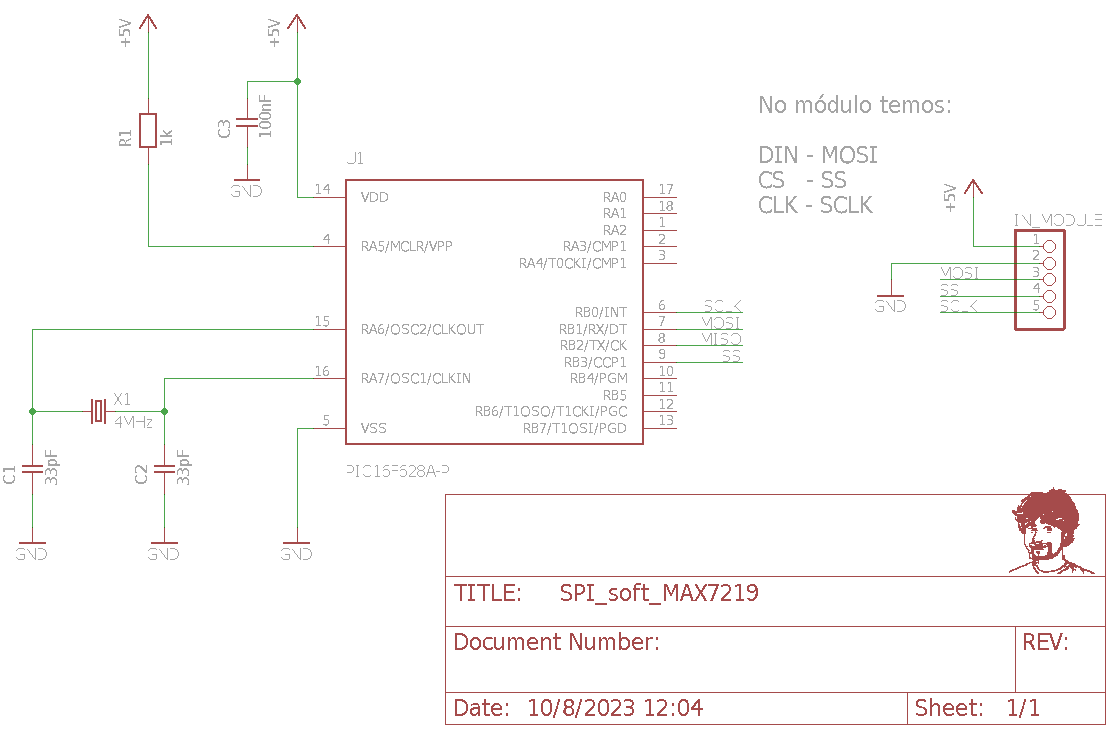
Note que o
microcontrolador utilizado foi o PIC16F628A, que não
possui um periférico interno SPI. Você poderá montar
esse exemplo em um proto-board sem
maiores problemas. O código precisa ser compilado via
ferramenta MPLABX Microchip com o
compilador XC8 2.40 ou superior.
Obs.:
Todas as informações sobre a placa PE-PIC16F628A
utilizada nesta experiência podem ser obtidas aqui.
CONCLUSÃO
Conhecer um
protocolo garante a você que pretende entrar no mundo
dos microcontroladores um maior "controle" sobre as
várias situações que podem surgir durante a sua
carreira. Hoje em dia, o uso de bibliotecas e/ou
ferramentas "mágicas" permitem uma grande velocidade no
desenvolvimento, porém as mesmas estão tirando dos
estudantes/aprendizes algo que é irreparável: o
conhecimento necessário sobre alguns conceitos
importantes! Saber como usar uma biblioteca/ferramenta
não difere você dos demais. O que vai fazer a diferença
é o conhecimento sobre um determinado assunto/conceito.
Bons testes, bons estudos e até a próxima!
DOWNLOADS
- Pacote com
arquivos (*.c, *.h e arquivo HEX)