PLACA DE ESTUDOS E TESTES
PE-PIC16F628A
Já há algum tempo eu tenho o projeto
dessa placa. Ela foi desenvolvida para servir de base
e estudos de projetos da minha turma de
Microcontroladores de 2010/2011, quando ministrei
aulas em um colégio técnico na zona sul de São Paulo.
Essa placa é ideal para o iniciante que deseja
aprender sobre os microcontroladores PIC. E também
pode ser utilizada por professores da área da mesma
maneira que usei um dia.
Para muitos
o popular PIC16F628A está "obsoleto", "desatualizado".
Isso porque temos
nos dias atuais microcontroladores de 32bits com suporte
a periféricos fantásticos (WiFi, rede LAN,
Bluetooth, etc). E sendo assim, porque então
aprender a lidar com um microcontrolador de 8 bits
considerado por muitos “especialistas” no assunto como
“obsoleto”? A resposta para essa pergunta é muito
simples: se você quer
realmente aprender sobre microcontroladores,
iniciar com um pequeno microcontrolador de 8 bits
sem muitos recursos ainda é a melhor opção.
O CIRCUITO
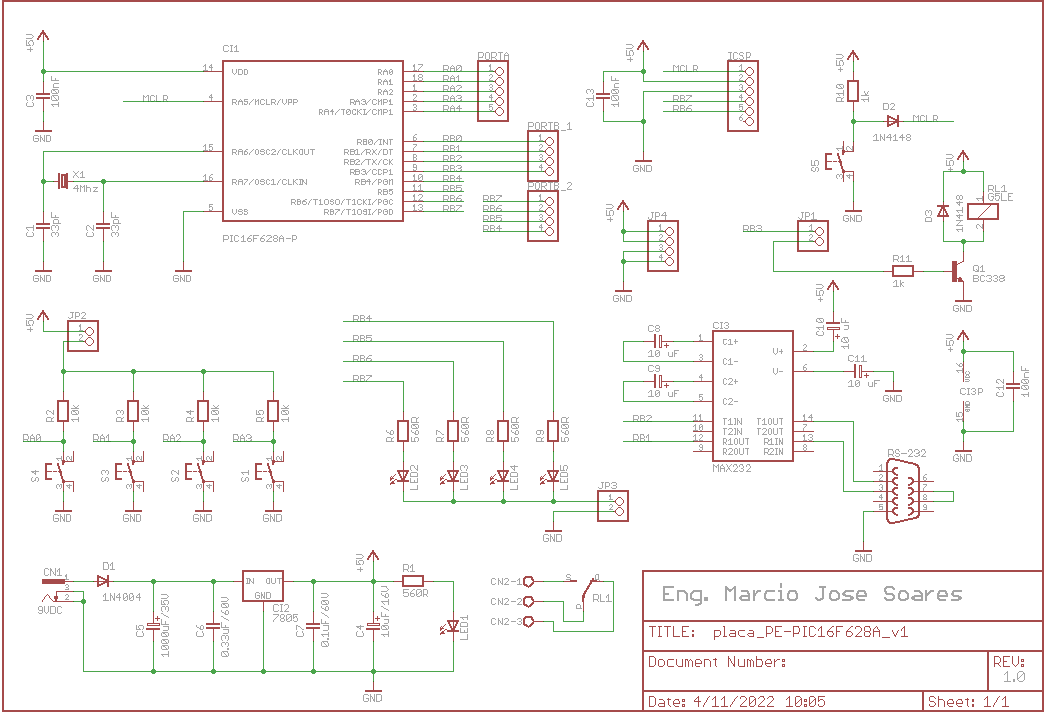
Na
figura acima mostro o esquema elétrico da placa. CI1 é
o conhecido microcontrolador PIC16F628A. Seus pinos de
I/O estão ligados a barra de pinos PORTA e PORTB_1 e
PORTB_2, o que facilita muito o uso destes. Na placa
existem também 4 LEDs para testes, LED2 a LED5 ligados
ao PORTB_2. O jumper JP3 liga os cátodos dos
LEDs ao GND. Dessa forma, caso o usuário queira
utilizar essa parte do PORTB (MSB) sem a interferência
dos LEDs basta deixar esse jumper "aberto". As
chaves S1 a S4 estão ligadas ao PORTA e o jumper
JP2 permite ligar ou não os 5VDC aos resistores de pull-up
das mesmas (R2 a R5). Dessa forma o usuário também
poderá utilizar o PORTA para outros testes, sem que
estes resistores interfiram.
A
placa também tem um relé para testes, RL1. Esse relé é
controlado pelo pino RB3 através do transistor Q1 (NPN
BC338). E caso o usuário deseje utilizar esse pino
para outro fim, poderá abrir o jumper RB3. CI3
serve para adaptar os níveis de tensão de
entrada/saída dos pinos RB1/RB2 (RX/TX) TTL 5VDC para
os níveis de tensão RS-232 (+/-12VDC).
A
placa possui ainda um regulador de tensão CI2 (7805) para 5VDC/1A que é mais
que suficiente para os dispositivos de testes
presentes na placa (LEDs, chaves, relé e porta
RS-232), além de periféricos externos como: LCDs, CIs
conversores AD, memórias I2C, dispositivos SPI+.++++
e muitos outros. Na entrada da fonte (9VDC) foi
inserido o diodo D1 para prevenir contra inversões. Os
capacitores C5, C6, C7 e C4 são os filtros da fonte. O
LED1, juntamente com seu resistor limitador de
corrente R1, formam o indicador visual de "fonte
ligada, 5VDC presentes".
A
entrada para gravação é feita através do conector
ICSP, padrão Microchip presente nos gravadores
PICKit2 e PICKit3.
Note
que a placa conta com um circuito oscilador externo
formado pelo cristal oscilador X1 de 4MHz e os
capacitores C1 e C2. Porém caso o você deseje utilizar
os pinos RA6 e RA7 como pinos de I/O poderá optar por
não montar estes componentes e utilizar o oscilador
interno presente no PIC16F628A. O circuito de reset
é formado pela chave S5, o resistor R10 e o diodo D2.
O mesmo caso se aplica aqui caso estes componentes não
sejam montados. O pino RA5 poderá ser utilizado como
I/O e ao programar o PIC bastará configurar o reset
interno.
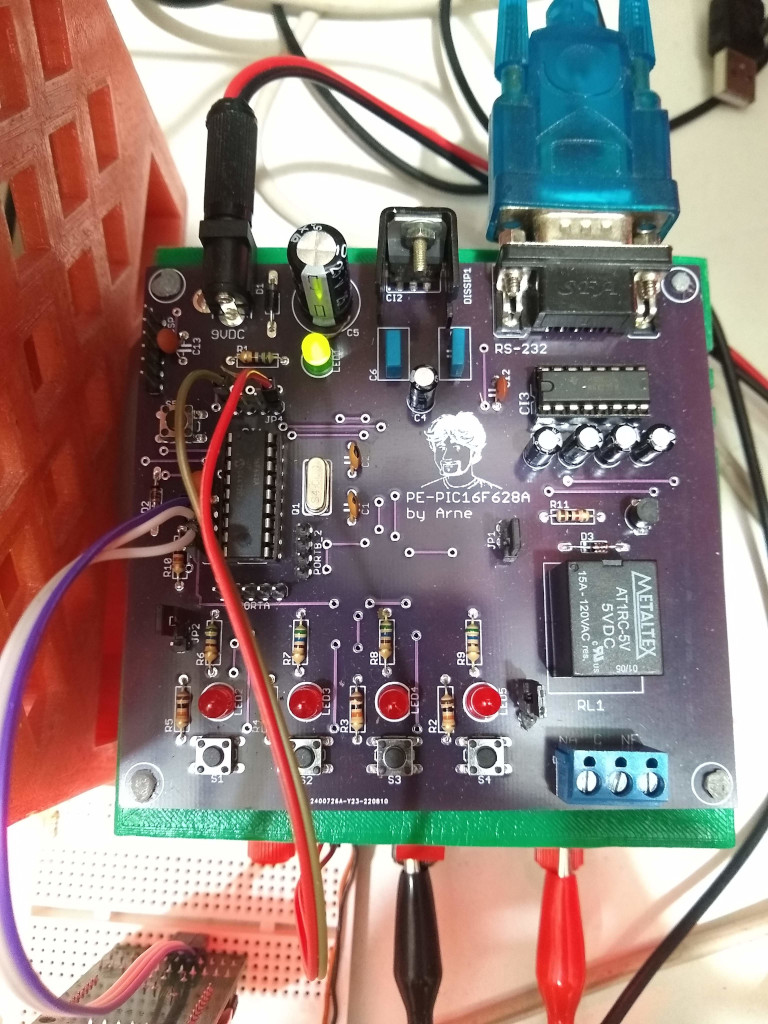
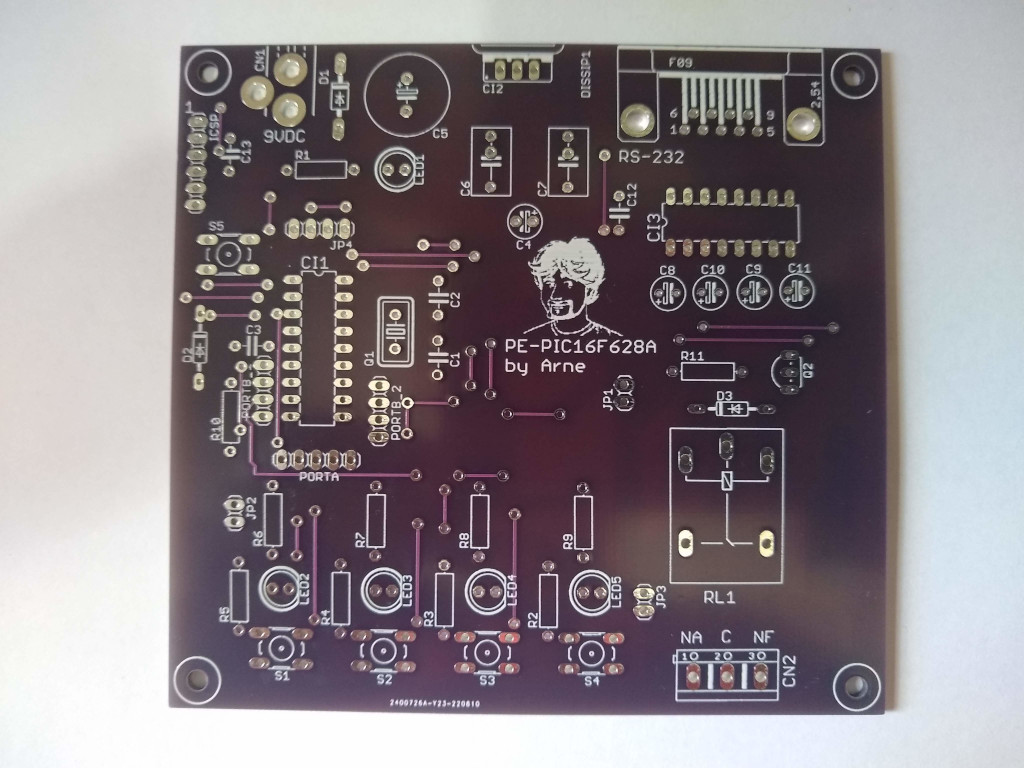
MONTAGEM
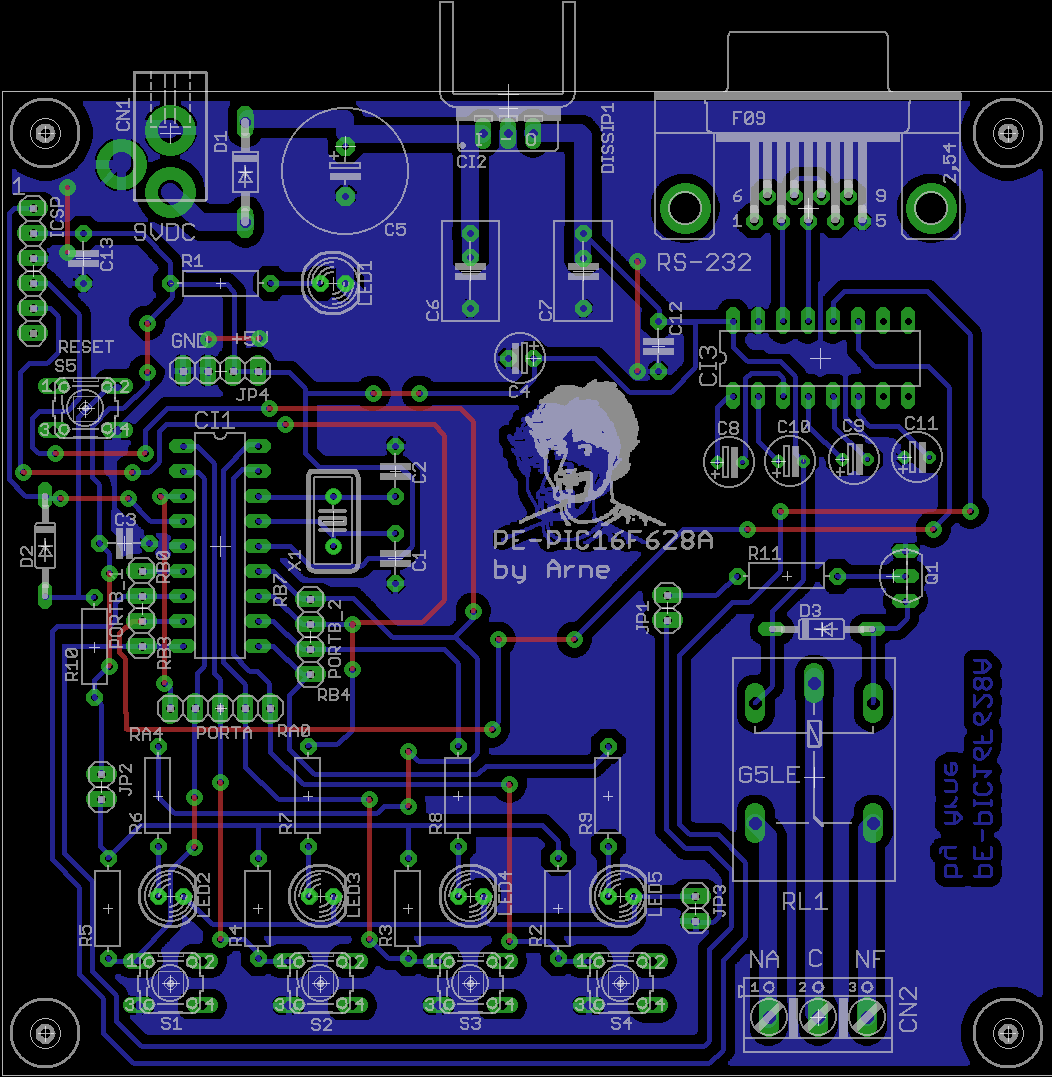
O
para a confecção do circuito impresso pode ser visto
acima. O mesmo pode ser confeccionado utilizando uma
placa dupla face ou ainda face simples e nesse caso as
trilhas do lado superior podem ser feitas utilizando
fios pelo lado de baixo da placa ou ainda pelo lado
superior mesmo.
Comece
soldando os resistores, tomando cuidado apenas para
não trocá-los de lugar. Atenção ao código de cores de
cada um. Em seguida monte os capacitores cerâmicos e
de poliéster. Monte também as chaves, o cristal (se
este for o caso) e as barra de pinos. Até aqui os
componentes não possuem polarização e você não precisa
de um cuidado relacionado a isso.
Em
seguida monte os diodos, LEDs, capacitores
eletrolíticos, o regulador e o transistor. Cuidado
agora, pois são componentes polarizados. Monte o relé
e os conectores para entrada de alimentação, saída
para os contatos do relé e o DB09 fêmea para
comunicação RS-232. É recomendado usar um pequeno
dissipador de calor no regulador de tensão.
É altamente
recomendado o uso de um suporte/soquete de CIs
para CI1. Isso permitirá que você possa trocar ou
ainda remover o microcontrolador para ser
utilizado em outro projeto qualquer. O uso de um
microcontrolador PIC16F648 também é permitido
nessa montagem, com a vantagem de se garantir o
dobro de memória de programa para seus
projetos/testes. A montagem do CI3 pode ou não ser
feita utilizando um suporte. Lembrando apenas que
ambos os CIs precisam ser montados da forma
correta, indicada na placa. Qualquer inversão na
montagem de qualquer um deles poderá causar a sua
perda irremediavelmente.
Com
tudo montado, faça uma verificação minuciosa. Não
tenha pressa nesse momento. Verifique sua montagem com
calma e bastante atenção.
Obs.: Dependendo da data em que
você estiver lendo esse artigo, pode ser que eu
ainda tenha comigo algumas placas
confeccionadas. Caso tenha interesse em adquirir
uma (apenas a placa para montagem, sem
componentes), por favor entre em contato através
de um dos meus e-mail's:
arne_robotics@hotmail.com ou
contato@arnerobotics.com.br.
PROGRAMA DE TESTES
Abaixo
segue um pequeno programa de testes que fará os LEDs
funcionarem como um sequencial vai e vem e
pressionando as chaves é possível alterar a velocidade
do sequencial. Para isso, feche os jumper's JP2 e JP3
e mantenha aberto JP1.
O
programa foi desenvolvido utilizando a IDE MPLABx
juntamente com o compilador XC8 ambos da Microchip,
mas você poderá utilizar o compilador que estiver
acostumado ou ainda outro a sua escolha. Lembrando
apenas que a portabilidade não é garantida em 100% de
uma IDE/compilador para outro e algumas adaptações
poderão ser necessárias. Isso fica por conta de cada
um.
//****************************************************************************** // Projeto Teclas para placa PE-PIC16F628A // Desenvolvido por: Eng. Márcio José Soares // // V1.0 - 06/09/2022 // // Compilador: XC8 v2.45 // IDE : MPLABX 6.0 Linux // Plataforma: placa PE-PIC16F628A com PIC16F648A // Gravador : PICKIT3 // // Pinos utilizados: // RA0 : S4 // RA1 : S3 // RA2 : S2 // RA3 : S1 // RB4 : LED5 // RB5 : LED3 // RB6 : LED2 // RB7 : LED1 // //****************************************************************************** //****************************************************************************** // Bits de configuração #pragma config FOSC = HS // Seleção do oscilador (Oscilador externo: cristal) #pragma config WDTE = OFF // WDT desabilitado #pragma config PWRTE = ON // Power-up Timer desabilitado #pragma config MCLRE = ON // MCLR = reset #pragma config BOREN = OFF // Brown-out Detect BOD disabilitado #pragma config LVP = OFF // Low-Voltage Programming desabilitado - I/O RB4 #pragma config CPD = OFF // EEPROM desprotegida pode ser apagada/lida/escrita #pragma config CP = OFF // Flash desprotegida pode ser lida/escrita //****************************************************************************** // Se nenhuma freqüência foi definida, assume 4MHz // Esta definição é exigida para calibrar as funções __delay_us() e __delay_ms() #define _XTAL_FREQ 4000000 //****************************************************************************** // Inclui arquivos #include |
VÍDEO
Abaixo é possível ver um vídeo da placa em pleno funcionamento realizando uma série de testes interessantes.
CONCLUSÃO
DOWNLOADS
- Circuito (PDF)
- Lay-out do circuito (botton não invertido; top e silk invertidos - PDFs "zipados")
- Lista de materiais