TACO-BIKE - Um
"tacógrafo" para bicicletas

- "Papai, qual a velocidade máxima que eu consigo alcançar com minha bike?!"
- "Quanto tempo eu pedalei?!?"
- "Qual a distância eu percorri?!?"
Pensando nisso, resolvi mostrar a ele que era possível desenvolver um pequeno circuito que lhe daria estas respostas. Você pode até pensar: "Isso tem pronto em uma bicicletaria!!" ou ainda "tem app no celular que faz isso!". É tem tudo isso sim, mas ai eu pergunto: "Qual a graça?!?". Criar/montar sua própria solução é bem mais divertido e de quebra, no meu caso, eu ainda tive a companhia do meu filho que aprendeu algumas coisas que com certeza, ficarão com ele pr muito tempo!
INTRODUÇÃO
O taco-bike tem alguns recursos interessantes e bem simples:
- medir a velocidade da bicicleta
- medir a distância total percorrida
- medir o tempo total de pedalada
O CIRCUITO
- Compatível com a linha MCS®-51;
- 2K Bytes de memória Flash reprogramável;
- Resistência a 10.000 ciclos de gravação/apagamento;
- Faixa de operação de 2,7 V a 6 V;
- Clock até 24 MHz;
- Bloqueio de memória de programa com dois níveis;
- RAM interna de 128 x 8 bits; 15 linhas de E/S;
- Dois temporizadores/contadores de 16 bits;
- Seis fontes de interrupção;
- UART para comunicação RS-232;
- Saídas com capacidade para acionamento de LEDs;
- Comparador analógico; Modos Low-power Idle e Power-down;
- Encapsulamento DIP ou SOIC 20 pinos;
Esse
"carinha" fez sucesso há alguns anos atrás e até hoje
pode ser encontrado em alguns projetos atuais!
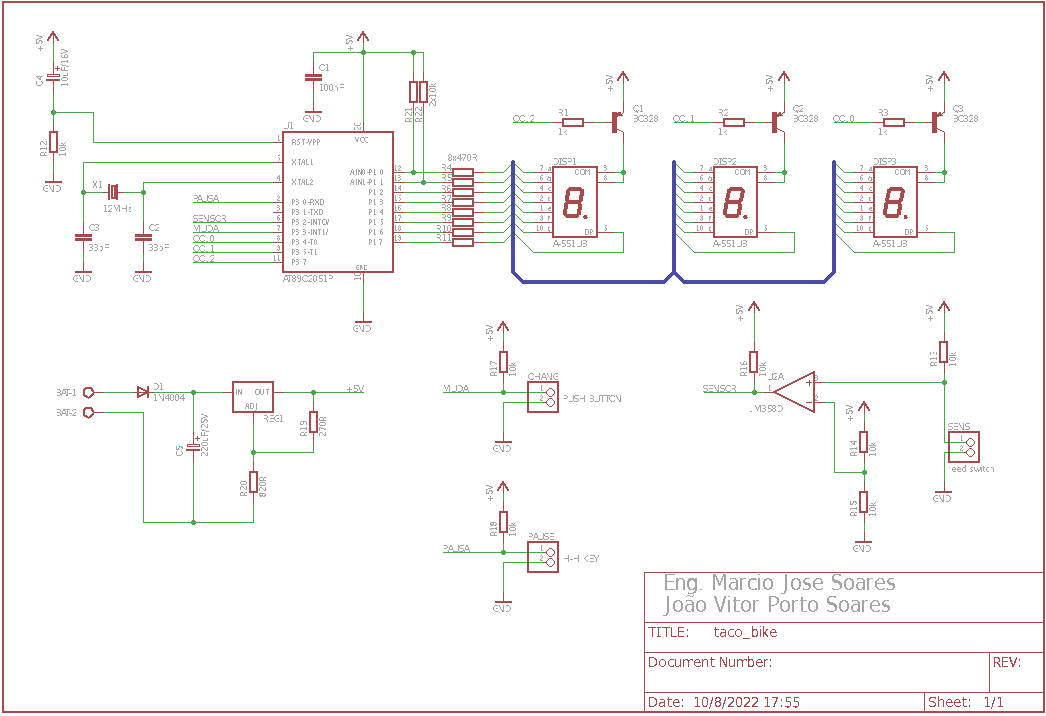
DISP1 a
DISP3 são displays de 7 segmentos com anodo comum modelo
A-551UB. As linhas "a, b, c, d, e, f, g e p" foram
ligadas ao PORT P1 do microcontrolador através dos
resistores limitadores de corrente R4 a R11 de 470R. Os
anodos foram conectados de maneira independente ao
microcontrolador através dos transistores Q1 a Q3.
Observando o circuito você poderá notar que estou
utilizando o método da varredura no controle dos
displays. Para mostrar um valor de 0 a 9 no display 1,
por exemplo, basta colocar o byte correspondente ao
número desejado (dentro de uma matriz no programa) no
PORT P1 e colocar o transistor Q1 em saturação através
do pino P3.7 do microcontrolador. Fazendo isso de uma
forma rápida podemos "varrer" todos os 3 displays cada
qual com seu valor até que voltamos ao ponto inicial.
Devido a "persistência retiniana" o usuário não percebe
essa varredura e o que ele vê são todos os digitos
apresentados no "display".
Os pinos do
microcontrolador P3.0 e P3.3 são as "entradas" para o
controle do taco-bike (PAUSA e MUDA),
respectivamente. R17 e R18 são resistores de pull-up
para as portas de entrada. O resistor R12 em conjunto
com o capacitor eletrolítico C4 formam o circuito de
reset do microcontrolador. X1 e os capacitores cerâmicos
C2 e C3 foram o "circuito de clock" para o
microcontrolador que opera a 12MHz. R21 e R22 são
resistores de pull-up para os pinos P1.0 e P1.1
que não possuem resistores de pull-up internos.
A entrada
do para que sejam realizadas as medidas é feita através
de U2, um amplificador operacional duplo (apenas um é
utilizado) configurado como comparador. O sensor do tipo
reed switch é ligado ao pino 3 (entrada positiva)
e o pino 2 recebe um divisor de tensão por 2. Sempre que
a tensão aplicada a entrada positiva for maior que a
tensão aplicada a entrada negativa temos na saída o
valor de VCC, e vice-versa. Note que temos na entrada
positiva um resistor de pull-up que garante VCC
a essa entrada. Quando o reed switch fechar,
teremos nessa entrada GND e consequentemente na saída
GND também, e um pulso é enviado ao microcontrolador
através da entrada P3.2. A presença de um comparador
nesse caso pode parecer estranha, mas o mesmo evita que
pulsos muito pequenos disparem o contador no
microcontrolador já que o a saída de U2 só vai a GND
quando a tensão no pino 3 cair abaixo de 2,5V e só volta
a subir quando essa tensão voltar a ser maior que 2,5V.
A fonte é
simples e utiliza um regulador de tensão LM317
configurado para uma saída 5VDC (REG1) através dos
resistores R19 e R20. D1 protege o circuito contra uma
possível inversão da bateria. O capacitor C5 é utilizado
como filtro. A bateria utilizada é de 9V, mas pilhas do
tipo recarregáveis como 18650 (2x) também podem ser
utilizadas.
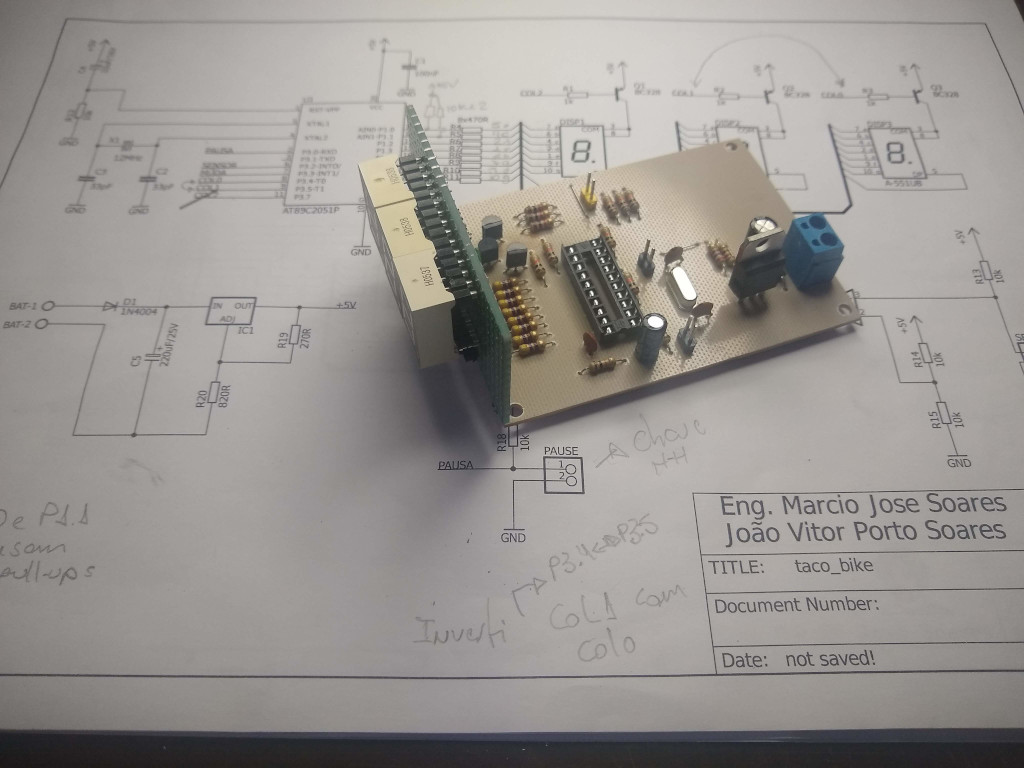
A MONTAGEM
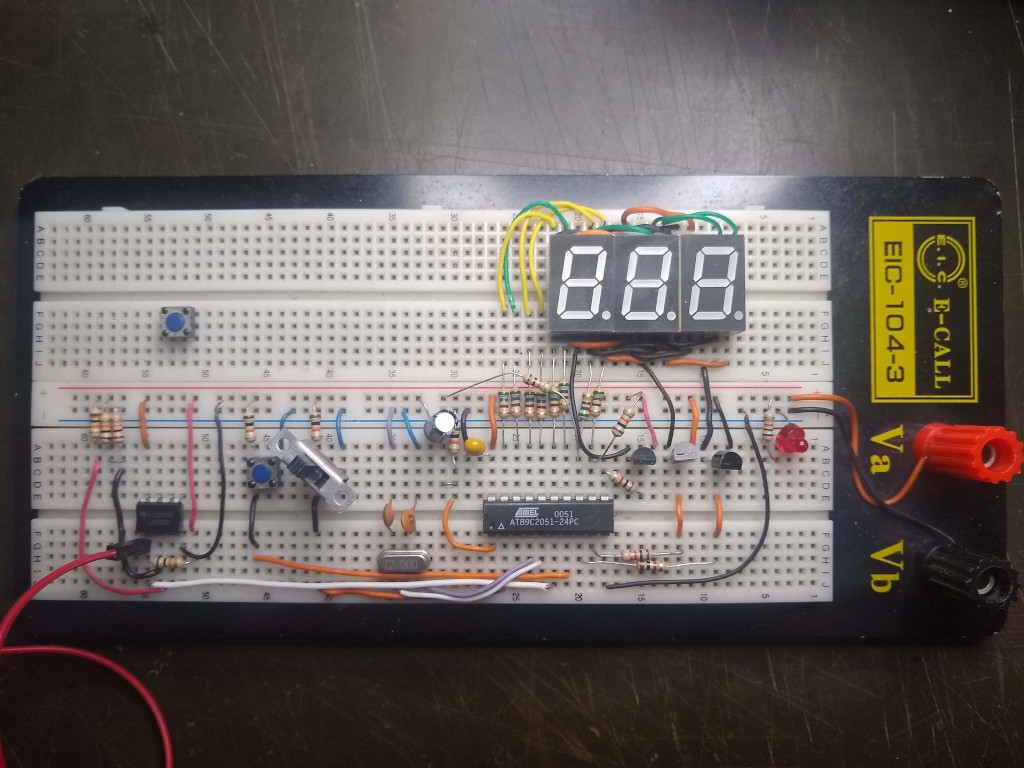
Na figura acima você pode ver uma imagem com o início do projeto numa protoboard. Costumo usar muito essa ferramenta na bancada, antes de prosseguir para um protótipo.
O PROGRAMA/FUNCIONAMENTO
A função principal "main" configura o microcontrolador (pinos de I/O, interrupção externa para o sensor e timers). Em seu laço principal ela distribui os valores para cada display e em seguida liga cada uma das colunas, uma por vez fazendo isso a cada 5ms aproximadamente. Dentro da função "main" também é verificado se o usuário deseja colocar o taco-bike em modo "espera" (PAUSA) ou se deseja trocar o dado visualizado no display (velocidade, distância percorrida ou tempo pedalando). A interrupção externa é a responsável por disparar e parar o timer. Dessa forma é possível contar quanto tempo o sensor levou para dar uma volta completa na roda e usando a velha fórmula:
A CAIXA
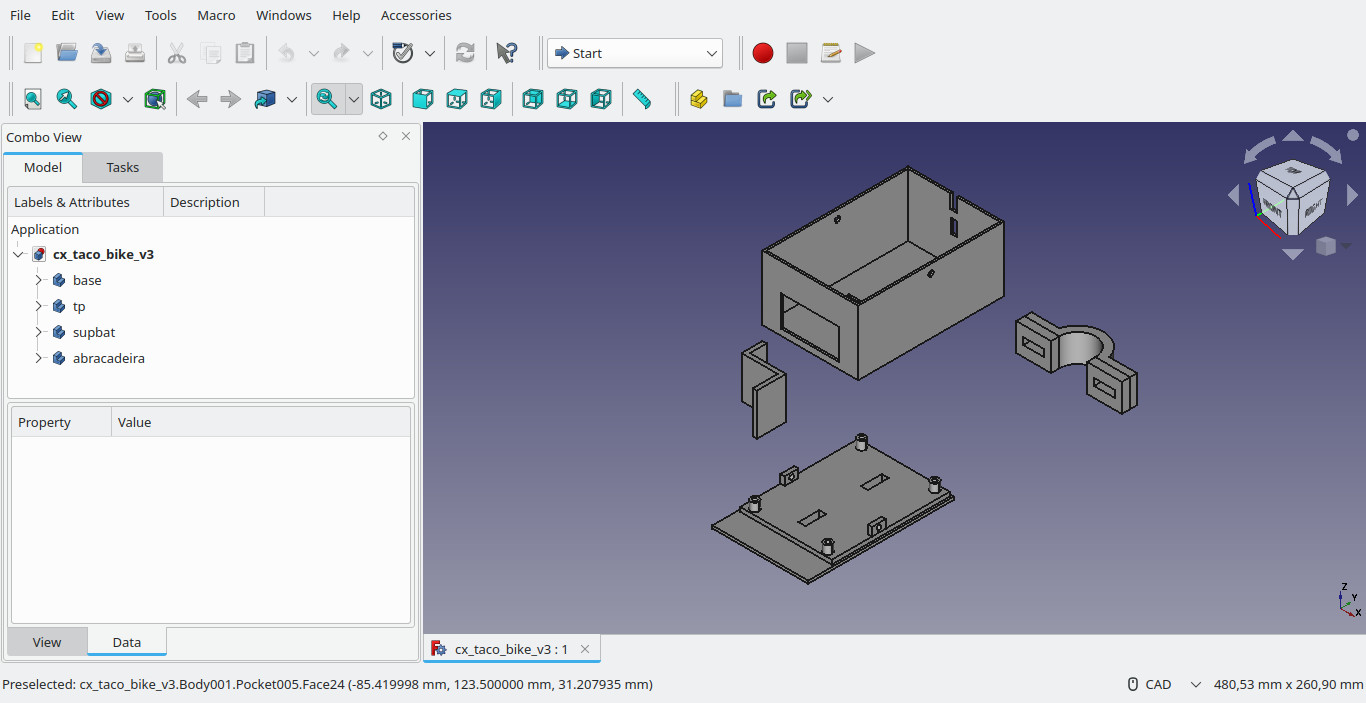
Eu poderia ter optado por uma caixa comercial para alojar o circuito. Mas confesso que desde a "chegada" da minha impressora 3D eu nunca mais comprei uma caixa. Desenhei a minha utilizando o FreeCad e os arquivos para impressão estão no meu perfil no Thingiverse.
CONCLUSÃO
Downloads:
- Pacote com programa - compilador SDCC (Arquivo Zip)