Robô IR
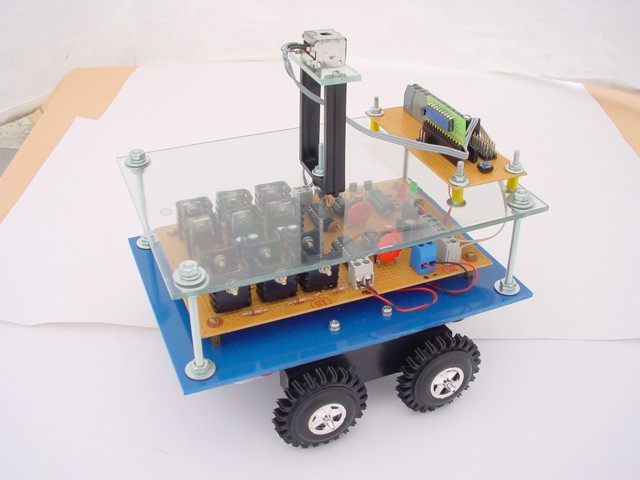
O Robô IR (Infra Vermelho) é um robô controlado através de um controle remoto para TV's. Nesta primeira versão são possíveis os seguintes movimentos:
- para frente
- para trás
- para a direita
- para esquerda
- e parada total
Clique para ampliar
|
 |
 |
O CIRCUITO
O circuito elétrico do Robô IR pode ser visto na figura abaixo. Para esta montagem optei por utilizar a “Placa Drive para motor DC”, um outro projeto meu. Assim consegui uma montagem mais enxuta.
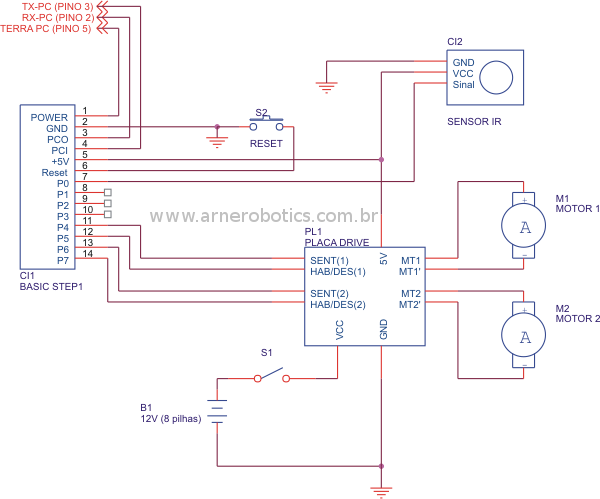
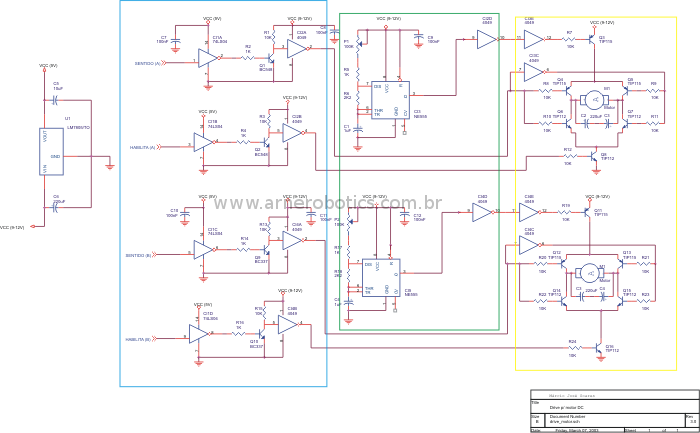
No
circuito elétrico, a placa drive
foi representada apenas com suas entradas e saídas,
facilitando muito o entendimento do circuito. O
circuito da mesma, pode
ser visto na figura abaixo.
No cirucito principal (cérebro), o Basic Step 1 realiza todo o trabalho de decodificação do sinal IR de controle e então "passa" os comandos para a placa drive, que realiza o trabalho de controle dos motores. A alimentação para o Basic Step1 foi obtida através da própria placa. Como se pode notar, não há muito o que falar sobre o circuito. Se você sabe como um microcontrolador funciona (necessário também a compreensão da lógica do programa) e entendeu o funcionamento da placa drive, vai compreender o funcionamento deste robô.
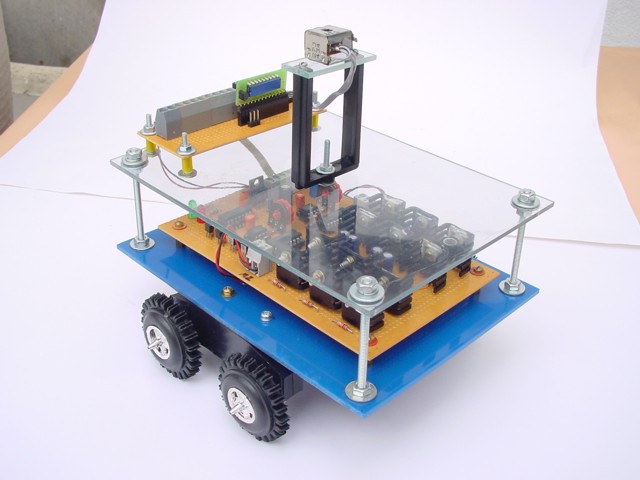
PARTES
MECÂNICAS
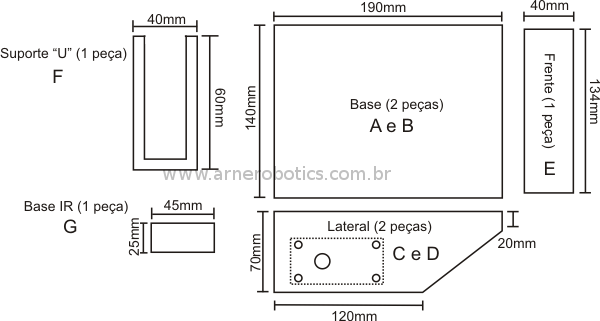
O material utilizado na montagem do Robô IR foi dos mais variados. Utilizei desde pedaços de pranchetas de plástico e acrílico, madeira, peças plásticas da minha sucata pessoal, motor de carrinho de brinquedo de loja daquelas lojas de R$1,00 (será que ainda existe alguma trabalhando com esse valor?!), etc. Abaixo mostro o lay-out das peças do meu robô. Porém note que as peças "C", "D" e "E" não fizeram parte do meu protótipo. Elas foram incluídas antes de eu me decidir por utilizar caixas de redução de brinquedos "baratinhos". Até então eu pensava em usar caixas de redução normais, daquelas comercializadas na web, como as presentes no site da Saber Marketing. Portanto, se você for montar esse robô e quiser utilizar tais caixas, nasta preparar todas as peças, caso contrário apenas as peças "A", "B", "F" e "G".
O SENSOR IR UTILIZADO
Em meu protótipo utilizei um sensor modelo 27J434 da Sharp, obtido em uma oficina de manutenção de televisores e aparelhos eletrodomésticos, próxima de minha casa, por R$8,00 (oito reais). Este sensor foi retirado de um vídeo que estava em uma pratileira para desmanche e reaproveitamento das peças por parte do técnico na oficina. Lembro que não é necessário obter exatamente o modelo em questão, já que qualquer modelo, de outras marcas, com operação similar poderá ser utilizado neste projeto desde que verificado e confirmado o seu funcionamento.
Para muitos o sensor pode parecer o componente mais difícil de se conseguir no mercado, mas não é. Como já dito, ele pode ser obtido em oficinas de manutenção. Muitas delas, inclusive podem encomendar a peça, caso você não queira utilizar uma retirado da sucata.
Para adquirir um sensor IR em uma oficina, você deverá solicitar um sensor que trabalhe com 5V na sua alimentação e emita sinais já amplificados e devidamente “quadrados” em sua saída. Geralmente eles possuem apenas três pinos (alimentação, terra e sinal). Peça maiores detalhes ao técnico, pois ao retirar o componente da placa ele pode facilmente identificar qual pino recebe “alimentação”, qual é ligado ao “terra” e qual deles é o “sinal”. Um outro ponto importante é o “descanso” do sinal. O sensor IR utilizado em meu protótipo, quando não tem sinal algum a ser decodificado, mantém o pino de sinal em nível lógico alto (+5V). É interessante que você verifique esta condição ao adquirir seu sensor IR.
DECODIFICAÇÃO DO PADRÃO SONY®
A figura abaixo mostra a seqüência dos pulsos gerados pelo controle remoto para o padrão Sony®. Basicamente ele consiste de um pulso de “start bit” (bit de “inicialização”) com duração de 2200 us (2200 x 10-6s) seguidos de 15 bits de dados. Todos os bits com nível lógico “1” têm 1100 us de duração. Já os bits com nível lógico “0” têm 550 us de duração. Após a seqüência ter sido enviada, um tempo de 23ms é dado para o envio da próxima seqüência, caso algum botão ainda esteja pressionado. Note que devido a velocidade dos pulsos, durante um simples toque em qualquer botão, várias seqüências iguais (referentes ao botão pressionado) são enviadas.

A
seqüência de
15 bits é o que interessa para a decodificação. Porém
nem todos os bits
serão utilizados, pois alguns deles apenas trazem a
informação sobre
qual equipamento será comandado (TV, VCR, DVD, etc).
Utilizei para este projeto o já conhecido
microcontrolador “Embedded”
Basic Step1 da Tato Equipamentos. Porém, infelizmente o
Basic Step1 não
é tão rápido para permanecer ao mesmo tempo em um “loop”
de operação
qualquer e testar todos os bits recebidos (o Basic Step1
não possui
interrupções). Porém existe uma maneira para se
contornar isso.
1)Testar a
presença do
primeiro bit com nível lógico baixo enviado logo após o
“start bit”.
2)Receber este bit e temporizar 20 ms. Dessa maneira
dispensa-se todo a
primeira seqüência de bits
3)Colocamos o Basic Step1 no aguardo da próxima
seqüência.
Pronto, agora o Basic Step 1 está esperando o próximo
“trem” de pulsos
e com velocidade suficiente para receber todos os bits
de informação.
Agora a largura dos sete primeiros bits é alocada em 7
variáveis
diferentes. Os oito pulsos restantes são ignorados. Após
a recepção é
feita a montagem dos bits em um byte que será
decodificado e
interpretado.
DOWNLOADS:
- Circuito elétrico
Robô IR
- Circuito Placa
Drive
- Programa Robô IR
- Lista de materiais - Veja circuitos elétricos, figuras
e texto
 |
Este projeto foi publicado, com minha autorização, na Revista Mecatrônica Fácil nº 11 de Julho/aAgosto de 2003. A placa drive também foi publicada nesta mesma revista. Especificações: - Cérebro - Basic Step 1
|