MICROCONTROLADORES
PIC - PRÁTICA - PARTE 2
CONTROLE DE SERVOS
O SERVO - UM POUCO DE TEORIA

Os servos são dispositivos muito empregados no fascinante mundo da mecatrônica. O fato é que, de todos os elementos capazes de converter energia elétrica em "movimento" mecânico, o servo é o que permite uma maior gama de aplicações. Podemos emprega-los na construção de braços mecânicos, usa-los como simples caixas de redução para locomoção de pequenos robôs, tratamento e controle de alavancas, entre outras.
Sua simplicidade de operação aliada as suas características mecânicas, permite seu emprego na “micro-robótica” para fins didáticos com muita facilidade.
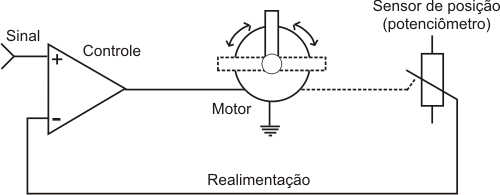
Na figura abaixo você pode ver a estrutura de um servo básico. Ele é constituído de um motor, um dispositivo de realimentação e um sensor de posição (geralmente um potenciômetro). É o dispositivo de realimentação que permite que a “alavanca” seja colocada na posição desejada, de acordo com a "resposta" do sensor de posição. Assim um servo permite transformar sinais elétricos em movimentos proporcionais. Isso porque existe uma “proporcionalidade” entre os sinais que são levados ao servo e a posição da alavanca.
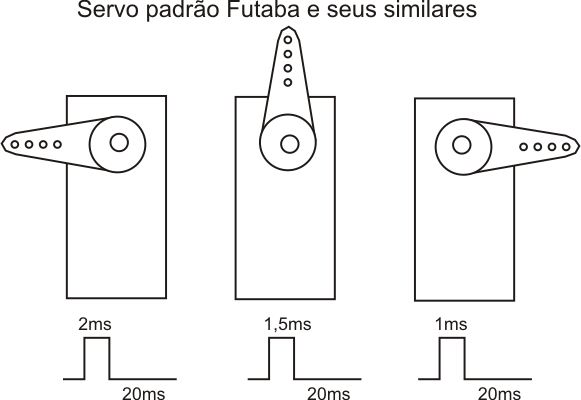
De acordo com a largura do pulso (sinal) recebido, o servo irá posicionar sua “alavanca”. Estes pulsos têm largura pré-determinada que variam de 1x10-3 segundos a 2x10-3 segundos, aproximadamente, com espaçamentos de 20x10-3 segundos, dependendo do fabricante. Sendo assim, podemos posicionar sua alavanca simplesmente variando a largura do pulso (sinal) a ser enviado.
O CIRCUITO PRÁTICO
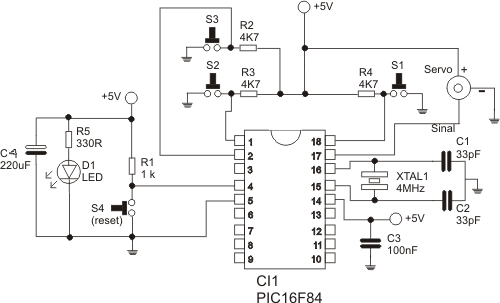
Na figura abaixo temos o circuito que será utilizado em nosso exemplo prático. O PIC pode controlar o servo sem o uso de transistores ou outros driver’s de potência. Ou seja, poderíamos inserir um servo em cada porta livre de nosso PIC, aumentando e muito as possibilidades do exemplo proposto.
Este circuito deve preferencialmente ser montado em um pront-o-board, placa padrão ou outro que proporcione rapidez e flexibilidade.
Para ligar o servo você poderá usar uma “barra de pinos” com 3 elementos, por exemplo, e para ajudar nas ligações, na figura abaixo você tem a descrição e disposição dos fios no conector dos servos de algumas marcas como Futaba e Hobbico.
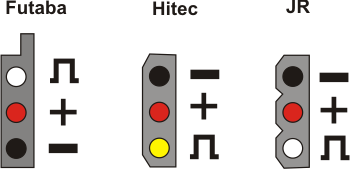
Caso
o servo que você tem em mãos não seja do tipo mensionado aqui,
siga a seguinte regra: geralmente os fabricantes dispõem a cor
vermelha para o positivo, preta para o negativo, reservando o branco
ou amarelo ou ainda uma outra cor para o sinal. Em caso de dúvida
consulte o fabricante ou distribuidor mais próximo.
O PROGRAMA
O programa de controle do servo pode ser visto na listagem abaixo. O programa faz com que o PIC envie pulsos conforme a chave pressionada: S1 permite posicionar a alavanca à direita, S2 posiciona a alavanca à esquerda e S3 centraliza a alavanca.
Listagem - Código fonte
|
;************************************************************** ;************************************************************** #include
<P16F84A.INC> ;inclui arquivo PICRES equ 0x00
;endereço de reset ; org PICRAM T1 res 1
;variável para temporizador ;
org PICRES ;reset ;
org PICINT ;toda interrupção aponta para
este endereço ; inicio:
movlw 0x00 ;ajuste para os bits INTCON ; loop: call TECLA ;verifica Tecla servo:
bsf PORTA,SERVO ;liga pulso ;aqui poderiam ser inseridos novos servos goto loop ;faz infinitamente ; TECLA:
nop ;perde 3 ciclos
btfss PORTA,CHV3 ;testa chave 3
nop ;perde 3 ciclos
btfss PORTA,CHV2 ;testa chave 2
nop ;perde 3 ciclos
btfss PORTA,CHV1 ;testa chave 1 goto TC0 ;nenhuma chave pressionada ; TC1:
nop ;perde 3 ciclos
movlw DIR ;carrega com valor direita
TC2:
nop
;perde 3 ciclos
movlw ESQ ;carrega com valor esquerda TC3:
nop ;perde 3 ciclos
movlw CENT ;carrega com valor centro TC0: return ;retorna ; Tservo:
movf POS,W ;carrega W com POS goto car_1 ;inicia temporização T20ms:
movlw 0x18 ;carrega W com 20ms goto car_1 ;inicia temporização ; car_1:
movlw 0xff ;carrega W com 255 dec_1:
decfsz T2,1 ;decrementa T2
goto car_1 ;volta a carregar
T2 ;
end |
Após pressionar uma chave o servo é mantido na posição indicada. Você poderá, como exercício, modificar a posição da “alavanca” de acordo com a chave, ou ainda utilizar as técnicas demonstradas em Controle PWM com PIC via software para montar um circuito que permita o controle proporcional da mesma com apenas 2 chaves.
Você também aumentar o número de servos controlados enviando-lhes os pulsos necessários para seu posicionamento, bastando para isso alterar a sub-rotina “servo”. Você pode aplicar este novo circuito proposto no controle de um robô manipulador (braço mecânico), por exemplo.
CONCLUSÂO
O controle de servos com o uso de microcontroladores é bem simples. Espero ter ajudado com mais este exemplo.
|
Material para o circuito Semicondutores CI1 –
PIC16F84A/4MHz – microcontrolador
R1 –
1 k – Marrom, preto e laranja
Capacitores C1, C22 –
33pF – cerâmico Diversos 4 -
chaves “push-botton”
|
Copyright deste conteúdo reservado para Márcio José Soares e protegido pela Lei de Direitos Autorais LEI N° 9.610, de 19 de Fevereiro de 1998. É estritamente proibida a reprodução total ou parcial do conteúdo desta página em outros pontos da internet, livros ou outros tipos de publicações comerciais ou não, sem a prévia autorização por escrito do autor.