Robô Rastreador
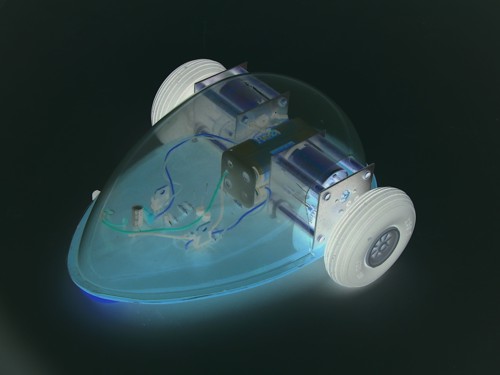
O robô rastreador é capaz de seguir uma linha, sem o uso de circuitos lógicos ou microcontrolador. Ele utiliza apenas transistores (4 no total) e um par de emissor/receptor de infravermelho (TIL32/TIL78). Apesar de possuir uma configuração bem simples, este robô é capaz de agradar qualquer "marmanjo".
O
chassi do robô foi feito a
partir da própria placa de circuito impresso, em
fenolite. A carenagem
do chassi é uma forma de ovô de páscoa caseiro de 750gr.
A "roda boba"
foi adaptada de "meia" bolinha de "ping-pong". Os
motores podem ser os novos moto-redutores da Arne
Robotics (consulte a Loja
do Arne). Tudo muito simples, mas bastante
funcional.
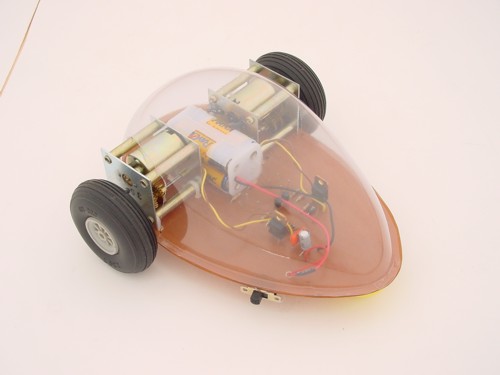
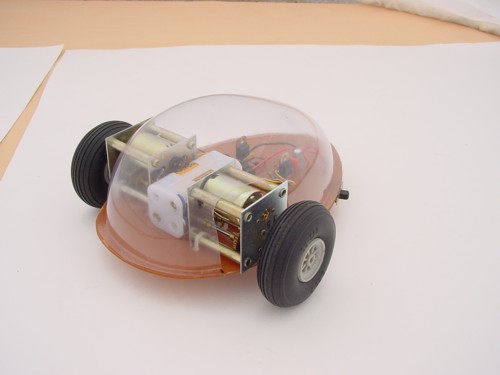
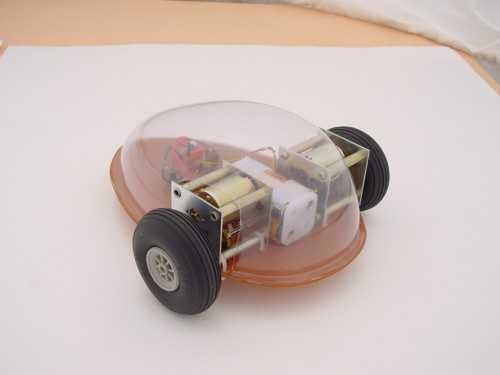
Veja mais algumas imagens. Clique para ampliar.
 |
 |
 |
 |
| Vídeo
demonstrando o funcionamento do robô |
CIRCUITO
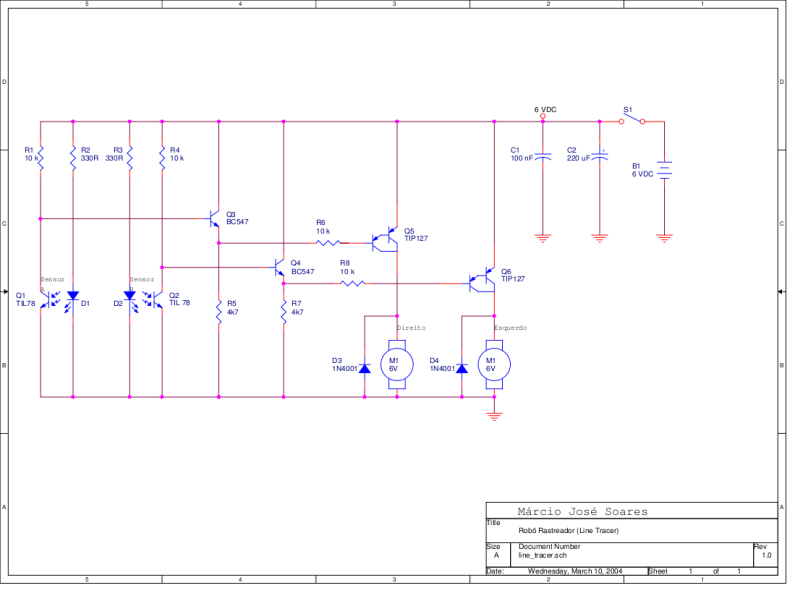
Obs.:
D1 e D2 = TIL32
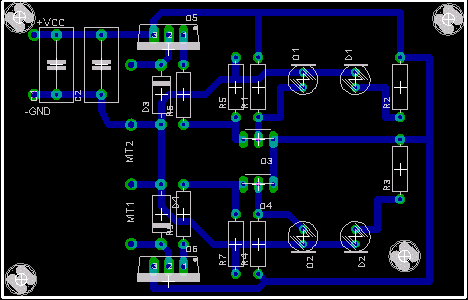
MONTAGEM (Placa)
A PISTA
DOWNLOADS:
- Circuito
do
Robô
Rastreador (arquivo PDF)
- Desenho
do
Lay-out para o circuito impreso - lado inferior -
invertido (arquivo PDF)
- Desenho
da pista em tamanho real (arquivo PDF)
- Gabarito
para montagem de outras pistas (arquivo PDF)
- Lista de materiais (veja circuito)
 |
Este projeto foi publicado, com minha autorização, na Revista Mecatrônica Fácil nº 16 de maio/junho de 2004. Especificações: - Cérebro - nenhum, apenas transistores |