Robô Inseto
Clique para ampliar
|
|
 |
 |
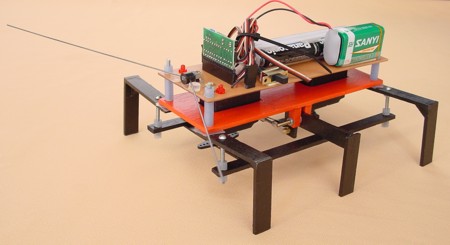
O "cérebro" do Robô Inseto é um microcontrolador Basic Step1 da Tato Equipamentos Eletrônicos. O programa foi desenvolvido em TBasic. Ele possui uma "antena" ligada a uma chave, que serve como sensor de contato. Sempre que o Robô Inseto encontrar um obstáculo ele desviará deste. Os led's são apenas para ajudar no "efeito visual", e indicam que o robô está executando um desvio. Tudo muito simples, mas funcional.
COMO O ROBÔ SE MOVIMENTA
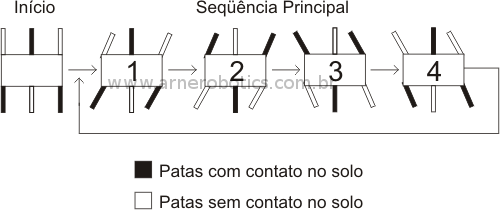
Analisando a figura abaixo você perceberá que um dos servos atua levantando um dos lados do robô (patas centrais). Isso faz com que duas patas “externas” fiquem em contato com o solo e outras duas não. As duas patas em contato com o solo são controladas pou um outro servo que faz com que as mesmas movam-se para frente ou para trás.
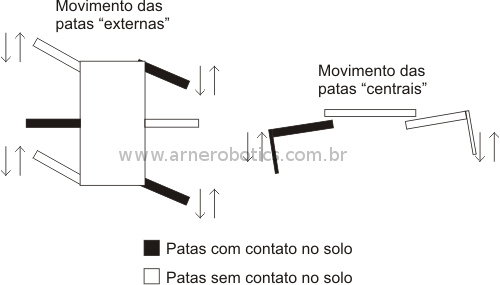
A figura abaixo demonstra a seqüência de movimentos para o Robô Inseto. Levantando um dos lados (movimento 1 e 2) e movendo as patas “externas” e depois levantando o outro lado e movendo novamente as patas “externas” (movimento 3 e 4) tem-se o movimento (à frente). Invertendo esta seqüência tem-se o movimento contrário (para trás).
Quando o robô “detecta” um obstáculo através de sua antena (sensor), ele prepara o desvio. Primeiro ele realiza 4 passos para traz e depois desvia para o lado esquerdo. Vamos falar um pouco mais sobre o desvio para que você possa compreender melhor como ele é feito. Acompanhe a figura abaixo.
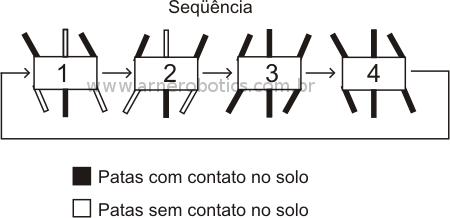
Alguns robôs de mesmo tipo, têm um número maior de servos e o desvio torna-se uma tarefa mais fácil. No caso do robô que eu desenvolvi o desvio é um pouco mais complexo. Primeiro o robô precisa ser “elevado” em um de seus lados. Depois ele precisa ser movido para traz (movimentos 1 e 2). Após este movimento o robô terá uma pequena inclinação para o lado. Então centralizamos as pernas de elevação e movimentamos as patas “externas” novamente para o lado contrário (movimentos 3 e 4). Neste momento o robô patina, pois todas as patas estão em contato com o solo. Novamente a operação (1, 2, 3 e 4) é executada até que o movimento seja suficiente para o desvio.
O CIRCUITO
O circuito do “Robô Inseto” pode ser visto na figura abaixo. Como você pode notar utilizei o já conhecido microcontrolador Basic Step 1, da Tato Equipamentos Eletrônicos.
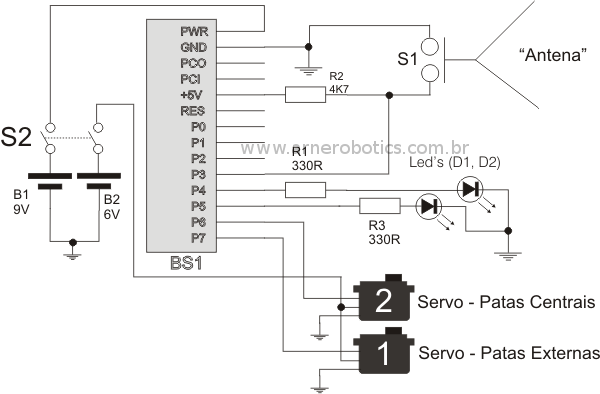
O Basic Step 1 realiza todo o processamento, controlando os dois servos para aeromodelos, uma chave “antena” (sensor) e os dois led’s (complementos visuais). Um dos servos controla as patas “externas” (srv 1) e o outro servo controla as patas “centrais” (srv 2). A antena serve como sensor de contato e permite que o “Robô Inseto” reconheça os obstáculos e desvie.
A “antena” foi montada a partir de um mini push-button e um pedaço de arame de aço de 34cm de comprimento com 2 mm de espessura. Para prender o arame a chave utilizei um pedaço de plástico com um furo no meio colada ao ponto móvel da chave (botão). Também utilizei dois pequenos pedaços de “cola quente”, cortadas com estilete, para dar melhor apoio ao conjunto.
PARTES MECÂNICAS
Para a partes mecânicas você irá precisar de alguns retalhos de madeira, arame, plásticos e parafusos.
Base
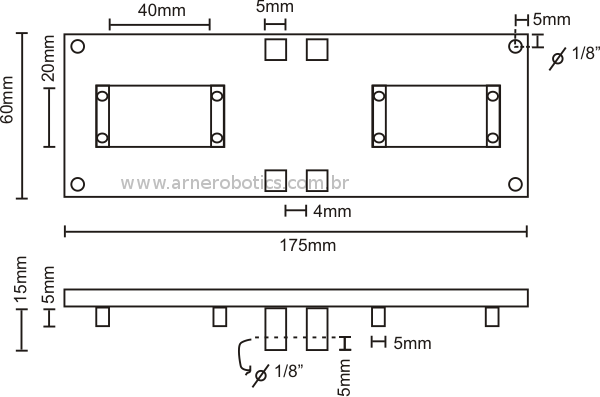
A base do robô foi montada em compensado de 4 mm de espessura. As furações são para servos comuns de aeromodelos. O servo “1”, que controla as patas “externas” fica a frente e o servo “2”, que controla as patas “centrais” fica atrás. Foram utilizados quatro pequenos pedaços de madeira com 20 mm de comprimento e 5 milímetros quadrados para apoiar os servos e permitir que os mesmos ficassem na altura correta de operação. Outros quatro pedaços de madeira com 15 mm de comprimento e 5 milímetros quadrados foram utilizados para construção do suporte das patas centrais. Todas as furações na base possuem 1/8 de polegada de diâmetro. Para a colagem das peças utilize, preferencialmente cola tipo epóxi para uma melhor resistência mecânica. Na falta deste tipo de cola, a cola branca ou o cianocrilato (Super Bonder) poderão ser utilizados.
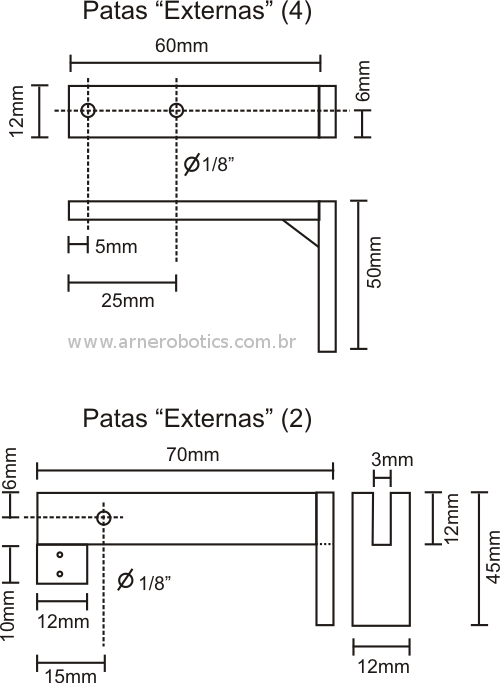
Patas
São necessárias 4 patas externas e 2 patas centrais. Estas foram feitas em madeira com 3mm de espessura. Todos os furos nas patas têm 1/8 de polegada de diâmetro, exceto os que deverão ser feitos nas patas centrais para fixação dos arames de controle, que devem ter a espessura do arame a ser utilizado. Aqui também é recomendável o uso da cola tipo epóxi para uma melhor resistência mecânica.
Elementos
de “transmissão”
Chamei de elementos de “transmissão” todos os elementos necessários à "transferência dos movimentos" dos servos para as patas. Foram utilizados dois pedaços de madeira de 175 x 10 x 3 milímetros (comprimento, largura e espessura) para ligar as patas “externas” dianteiras e traseiras e um pedaço de madeira de 93 x 10 x 3 milímetros (comprimento, largura e espessura) para ligar o servo “1” as patas “externas”. Este último elemento deverá ser parafusado em um link de servo, geralmente fornecido com o mesmo.
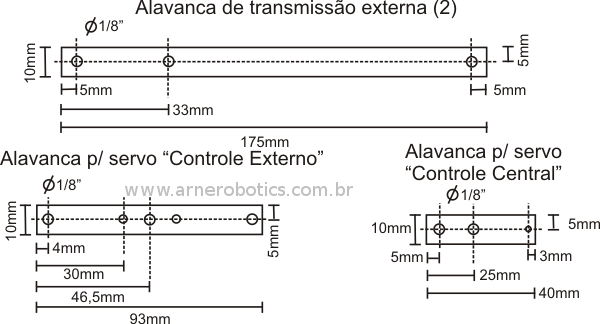
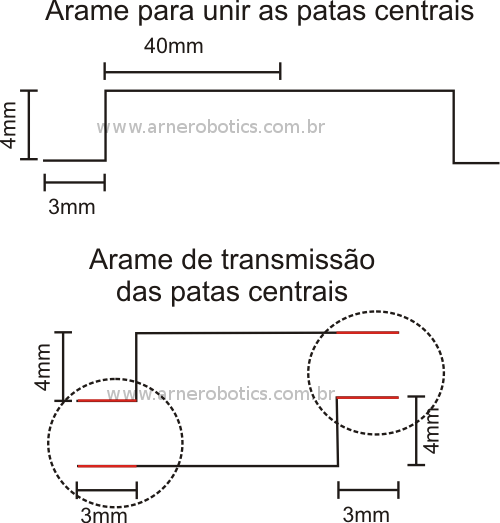
Para o elemento central foram utilizados: 1 pedaço de madeira com 40 x 10 x 3 milímetros (comprimento, largura e espessura) que também deverá ser parafusado em um link de servo e 2 pedaços de arame de aço com 2 mm de espessura. Você poderá substituir os arames por peças de aeromodelos conhecidas como “ball link” e arame de rosca.
Em meu protótipo, apesar de mostrar no esquema o desenho de dois arames, utilizei na verdade um arame para transmissão do movimento e um conjunto de peças para aeromodelos (2 ball link’s e um arame com rosca). Porém o efeito é o mesmo ok.
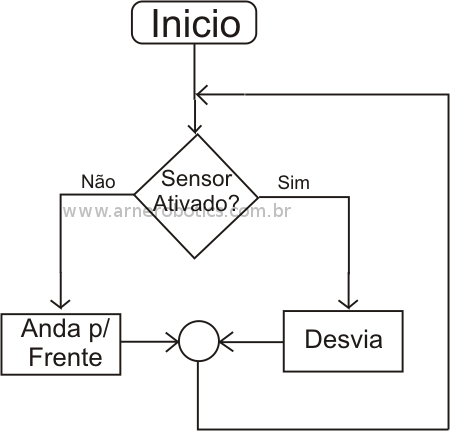
O PROGRAMA
O programa do Robô Inseto foi desenvolvido em linguagem TBASIC (para o Basic Step 1). Compreendido o conceito do movimento, todo o resto é simples. A figura abaixo você tem o fluxograma que demonstra o programa. O programa também foi ricamente ilustrado. Estude-o para compreender melhor o funcionamento do conjunto.
DOWNLOADS:
- Programa (Código fonte)
- Lista de materiais (veja circuito elétrico e o texto
para partes mecânicas)
 |
Este projeto foi publicado, com minha autorização, na Revista Mecatrônica Fácil nº 10 de Maio/Junho de 2003. Especificações: - Cérebro - Basic Step 1
|