Robô ADR-2


O ADR-2 ou "Andarilho 2" é um robô mais simples que a primeira versão, o ADR-1. Agora, o ADR-2 move-se obedecendo aos comandos enviados pelo micro PC, através da porta paralela.
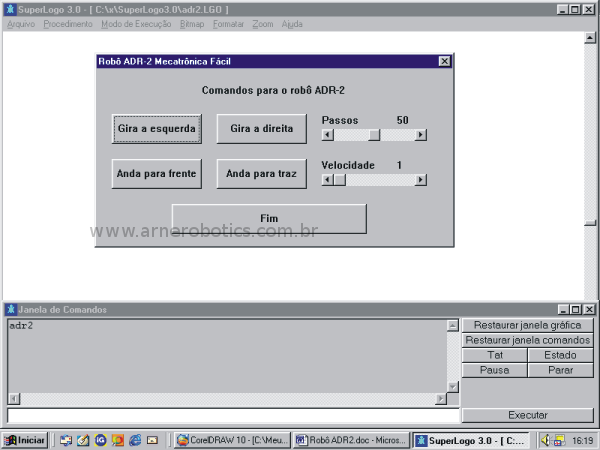
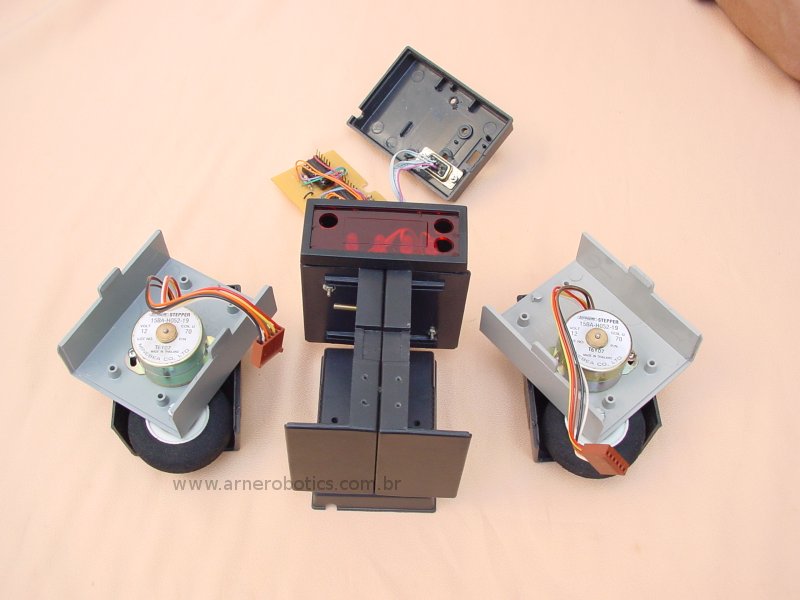
Para locomoção desta versão, foram usados dois motores de passo de seis fios. O "cérebro" do ADR-2 é um PC com um programa desenvolvido em LOGO. Este interpretador pode ser obtido gratuitamente no site http://www.nied.unicamp.br.
Todo o "corpo" do robô foi montado com caixas plásticas comerciais da fabricante Patola. Os LEDs são apenas para ajudar no "efeito visual" e não tem função prática. Super simples não acha?!?!
COMO FUNCIONA:
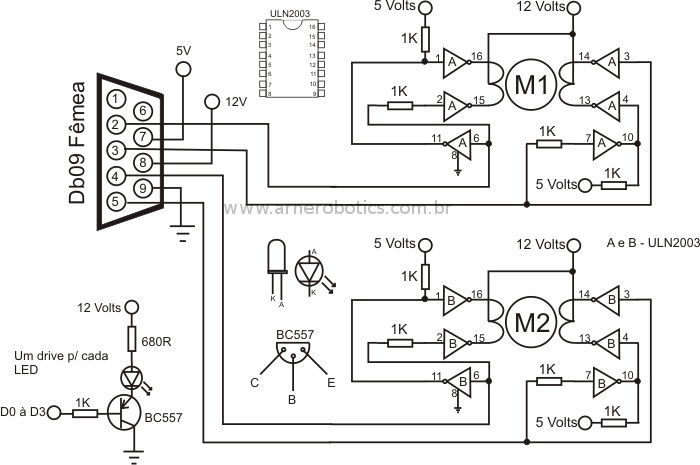
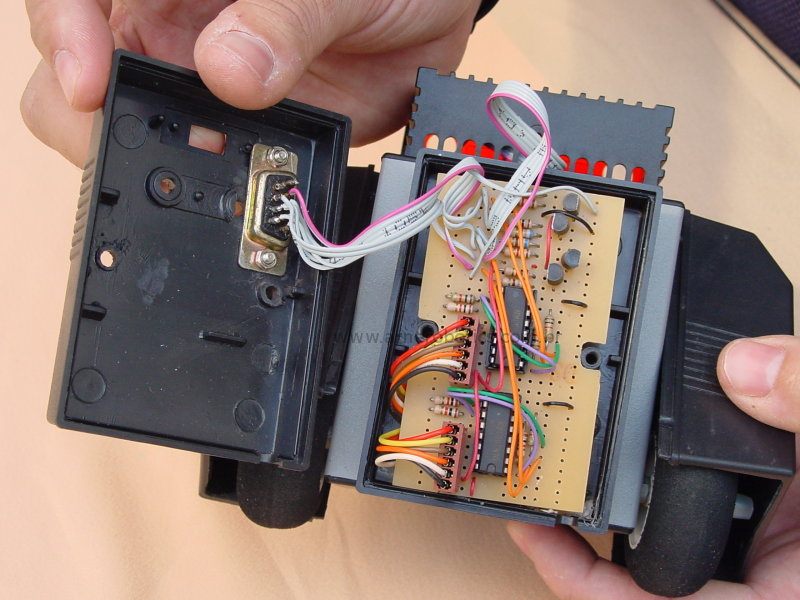
Mais abaixo, em downloads, você poderá encontrar o circuito elétrico do ADR-2. Ele é composto por dois driver’s de potência ULN2003 (para ligar a porta LPT aos motores), alguns resistores e dois motores de passo pequenos. O PC é o cérebro de controle do robô. Através da porta paralela deste uma seqüência de "pulsos" é enviada aos motores através dos drivers presentes no circuito, que permitem compatibilizar o nível TTL da porta paralela do PC aos 12V necessários ao controle dos motores de passo adotados, movimentando estes de acordo com o sentido desejado.
Um motor de passo funciona de forma diferente de um motor CC comum. Ele necessita que suas bobinas sejam “ligadas” e “desligadas” de maneira que o motor possa girar “passo-a-passo”. A velocidade com que estas bobinas são “chaveadas” determina a velocidade do motor e a seqüência do “chaveamento” o sentido de sua rotação. Na tabela abaixo, onde tem-se “1”, entenda como bobina “ligada” (VCC do motor), onde tem-se “0” entenda como bobina “desligada” (0 volts - GND). A tabela demonstra a seqüência para um sentido (1 - 4), para girar em sentido contrário, a seqüência de leitura da tabela deverá ser invertida (4 - 1).
|
|
Seqüência de Passos |
||||
|
1 |
2 |
3 |
4 |
...1... |
|
|
Bobina 1 |
1 |
1 |
0 |
0 |
1 |
|
Bobina 2 |
0 |
0 |
1 |
1 |
0 |
|
Bobina 3 |
1 |
0 |
0 |
1 |
1 |
|
Bobina 4 |
0 |
1 |
1 |
0 |
0 |
Um outro ponto importante no circuito é que, com a lógica adotada, é possível controlar um motor de passo com apenas “2 pontos”, em vez de quatro como demonstrado na tabela. Desta forma pode-se controlar até 4 motores através de uma porta paralela (são 8 bits - pontos - de controle). Estude o circuito para enteder isso melhor.
DICA:
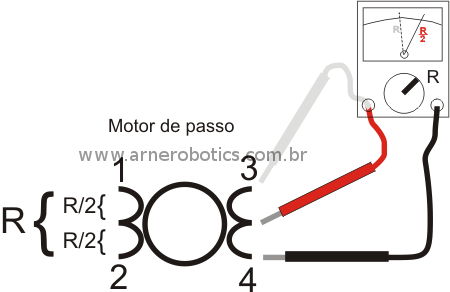
Para saber como os fios de um motor de passo deverão ser ligados ao circuito, a figura abaixo ilustra um motor de passo, com a disposição de suas bobinas e a resistência medida entre estas. A terminação tem sempre maior resistência, em relação ao valor medido entre a terminação e o fio central (que recebe a alimentação). A terminação 1 e 2 não possui ligação com a terminação 3 e 4. São bobinas independentes. Você, de posse de um multímetro na escala de resistências, deverá medir o valor da resistência nas bobinas do seu motor para encontrar a configuração dos fios para o mesmo, para uma perfeita ligação ao circuito.
Eu recomendo a você que se propôs a montar o ADR-2 adquira os motores de passo antes das caixas (corpo). São eles que irão dimensionar o tamanho exato do seu ADR-2. Os motores de passo utilizados em meu protótipo têm as seguintes dimensões: 40mm x 21mm (DxP) e eixo de 2mm de espessura.
Motores de passo são facilmente encontrados em “sucatões eletrônicos”, lojas de eletrônica e em casas de manutenção de computadores, já que estas também fazem a manutenção de impressoras.
Caso você não encontre motores nas medidas indicadas, poderá adotar um novo tamanho para o “corpo” do seu ADR-2, de acordo com os motores encontrados. O comércio especializado possui várias soluções em caixas plásticas, com tamanhos e padrões variados, nos mesmos moldes utilizados em meu protótipo, que poderão ser facilmente adaptados por você em seu projeto. Neste caso, é interessante você levar um motor até a loja para um eventual "tira-teima". Porém, é claro, você tem também como alterativa desenvolver seu próprio "design", utilizando outros materiais.
DOWNLOADS:
- Circuito elétrico
- Programa
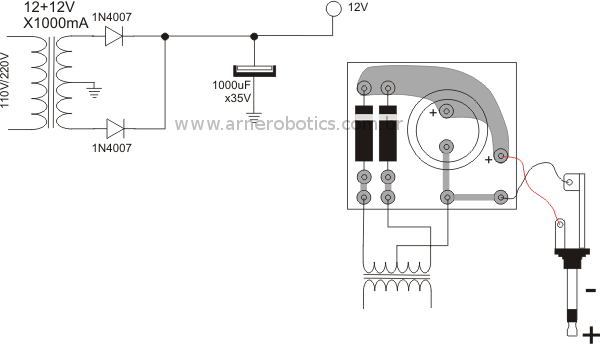
- Fonte de alimentação
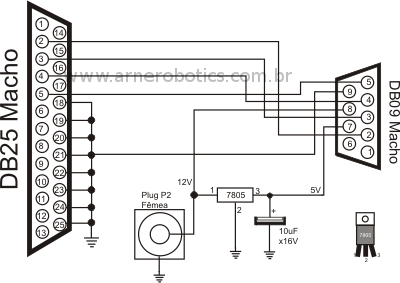
- Cabo de comunicação
- Lista de materiais
{kind=link}
{kind=link}
{kind=link}
MAIS IMAGENS:
 |
 |
 |
 |
 Este
projeto foi publicado, com minha autorização, na Revista Mecatrônica
Fácil nº 8 de Janeiro/Fevereiro de 2003.
Este
projeto foi publicado, com minha autorização, na Revista Mecatrônica
Fácil nº 8 de Janeiro/Fevereiro de 2003.
Especificações:
- Cérebro - PC
- Motores - 2 motores de passo
- Sensores - nenhum
- Alimentação- 12 V DC para os motores, 5V DC para LED's, etc
- Chassi - Caixas plásticas Patola
- Programa - Super Logo, Delphi, VB, "C", etc