A
proposta
Nesta oitava experiência
demonstrarei como utilizar Arne Basic 2k no controle de servos. E como
já é de
costume, primeiro acho interessante
mostrar um pouco da teoria para
em seguida apresentar a parte prática.
A teoria

Os servos são dispositivos muito empregados no fascinante mundo da robótica educacional. O fato é que, de todos os elementos capazes de converter energia elétrica em "movimento" mecânico, o servo é o que permite uma maior gama de aplicações. Podemos emprega-los na construção de braços mecânicos, usa-los como simples caixas de redução para locomoção de pequenos robôs, tratamento e controle de alavancas, entre outras.
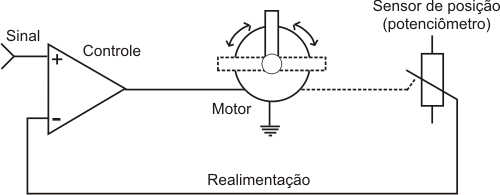
Na figura abaixo você pode ver a estrutura de um servo básico. Ele é constituído de um motor, um dispositivo de realimentação e um sensor de posição (geralmente um potenciômetro). É o dispositivo de realimentação que permite que a “alavanca” seja colocada na posição desejada, de acordo com a "resposta" do sensor de posição. Assim um servo permite transformar sinais elétricos em movimentos proporcionais. Isso porque existe uma “proporcionalidade” entre os sinais que são levados ao servo e a posição da alavanca.
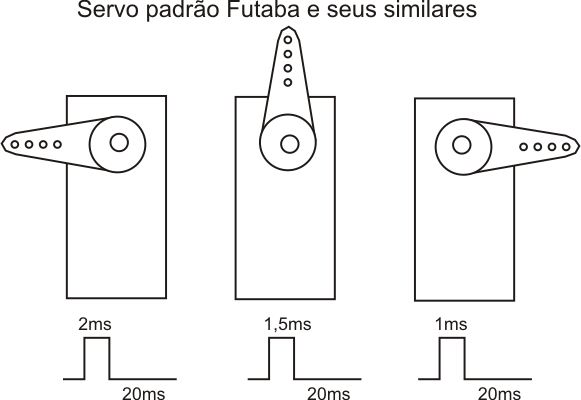
De acordo com a largura do pulso (sinal) recebido, o servo irá posicionar sua “alavanca”. Estes pulsos têm largura pré-determinada que variam de 1x10-3 segundos a 2x10-3 segundos, aproximadamente, com espaçamentos de 20x10-3 segundos, dependendo do fabricante. Sendo assim, podemos posicionar sua alavanca simplesmente variando a largura do pulso (sinal) a ser enviado.
A experiência
Na figura abaixo você tem o
esquema
elétrico proposto para esta experiência. Como você mesmo pode ver,
trata-se também de um
circuito extremamente
simples. Eu recomendo a montagem do mesmo em uma matriz de
contatos, afinal você está apenas "testando" um circuito.
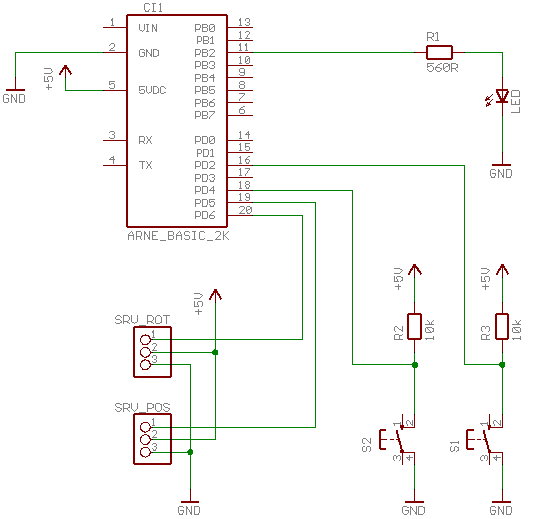
A
chave S1 faz o servo de rotação girar em sentido horário e avança
alguns graus o servo de posição também no sentido horário. Já a chave
S2 faz a mesma coisa em ambos os servos, portém no sentido
anti-horário..
Para esta experiência foi usado um LED em PB2, que piscará a uma
freqüência de aproximadamente 20Hz.
Para
operar os servos foi utilizado uma função interna do BASCOM, que
permite configurar até 14 servos e controlá-los de forma independente.
Esta função utiliza o timer0 e neste caso, ao usar a função SERVO o usuário do Arne Basic não poderá utilizar o timer0.
Você
pode ver o código fonte logo abaixo. Este programa é
mais um
excelente exemplo da estrutura da Linguagem de programação BASIC
utilizada pelo compilador BASCOM-AVR. Ele mostra o recurso do compilador para o controle de servos.
Vamos em frente com nossas experiências!!! Como diria o sr. Miagui - "Daniel San!!! Vamos para Japão! A hora da verdade continua!" ehehehehe
Código:'*******************************************************************************
'* Programa TESTE_SERVO_ARNEBASIC2K.BAS
'* Desenvolvido por Márcio José Soares
'* para do Arne Basic 2k
'*
'* Obs.: Este programa foi desenvolvido para testar o uso de servos
'* com o Arne Basic 2k. Veja o circuito em www.arnerobotics.com.br
'*
'* Servo 1 - servo de rotação
'* Servo 2 - servo de posição
'*
'* S1 gira horário servo de rotação e incrementa posição do servo de posição
'* S2 gira anti-horário servo de rotação e decrementa posição do servo de posição
'*
'*******************************************************************************
'*******************************************************************************
'Configs necessários ao microcontrolador
$crystal = 10000000
$regfile = "attiny2313.dat"
Config Portb = &B11111111 'todo portB é saída
Config Portd = &B11101010 'todo portD é saída, exceto PD0, PD2 e PD4
'*******************************************************************************
'Configura servos
Config Servos = 2 , Servo1 = PortD.6 , Servo2 = PORTD.5 , Reload = 10
'********************************************************************************
'Variáveis globais
dim myPOS as byte
'*******************************************************************************
'Liga pinos de I/O's a "nomes" mais fáceis ao entendimento humano ;-)
S1 Alias Pind.2 'pino de entrada para chave 1
S2 Alias Pind.4 'pino de entrada para chave 2
LED Alias PORTB.2 'LED
'*******************************************************************************
'Declaração das subrotinas
Declare Sub Check_tec()
'*******************************************************************************
'Habilita int para usar servo
Enable Interrupts
'*******************************************************************************
'Início do programa
Servo(1) = 100 'inicia girando horário
Servo(2) = 150 'posição central
myPOS = 150
Waitms 500 'aguarda 0,5 segundo
'*******************************************************************************
'Laço principal... faz eternamente
Do
call Check_tec() 'verifica teclas
toggle LED
Loop
'*******************************************************************************
'Subrotina para verificar se alguma tecla foi pressionada
Sub Check_tec()
waitms 50 'debounce para chaves
if S1 = 0 then 'S1 pressionada?
Servo(1) = 100 'valor para giro horário
if myPOS < 250 then 'ainda dentro do limite?
myPOS = myPOS + 5 'incrementa posição
Servo(2) = myPOS 'assume posição
end if
end if
if S2 = 0 then 'S2 pressionada
Servo(1) = 50 'valor para giro anti-horário
if myPOS > 100 then 'ainda dentro do limite?
myPOS = myPOS - 5 'incrementa posição
Servo(2) = myPOS 'assume posição
end if
end if
End sub
End 'fim do program