MICROCONTROLADORES
PIC – PRÁTICA - PARTE 1
CONTROLE
PWM COM PIC
PWM POR SOFTWARE COM PIC16F84
Este exemplo prático mostra a construção de circuito para controle PWM (Pulse Width Modulation), utilizando um PIC16F84 com manipulação dos pulsos via software.
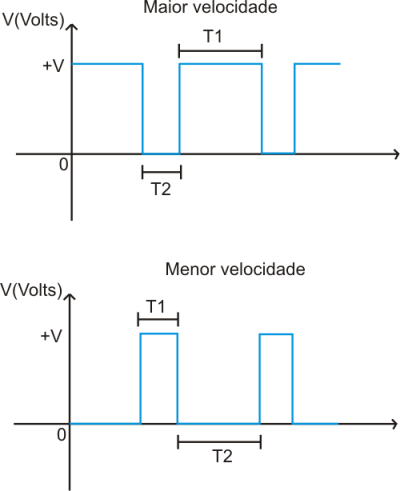
Um controle PWM permite variar a velocidade de um motor DC, por exemplo, através de pulsos. O “tempo” deste pulso determinará a velocidade do motor. Quanto maior for a duração de T1 e menor a duração de T2, maior será a velocidade. Quanto menor a duração de T1 e maior a duração de T2, menor será a velocidade. Vale salientar que os pulsos têm sempre o valor máximo da tensão aplicada (menos as quedas no circuito), proporcionando assim alto torque, mesmo em baixas velocidades. Veja a figura abaixo.
Sendo assim, vemos que este método de controle é o ideal para aplicações de motores CC para a tração de pequenos robôs, braços mecânicos e outros tipos de automatismos.
CIRCUITO PRÁTICO
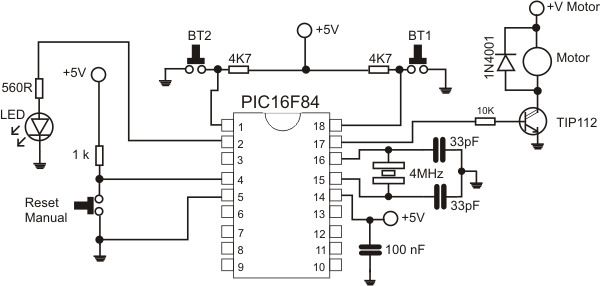
O circuito da figura acima poderá ser montado em um pront-o-board , placa padrão ou outro método que achar melhor. A idéia deste circuito é ser apenas um teste. Não preciso dizer que após a montagem do mesmo, seja qual for ela, você deve rever atentamente todas as ligações, evitando assim danos aos componentes, principalmente ao PIC, caso algo tenha sido ligado erro. No mundo "real" as coisas queimam!. Se você é adepto dos simuladores não tem muito com o que se preocupar, a não ser com o que esta perdendo: "o prazer inestimável de ter feito uma montagem e vê-la funcionando!!!". O transistor pode esquentar um pouco, dependendo do motor utilizado. O uso de um radiador de calor pode ajudar.
A alimentação para o circuito deve ser separada. O microcontrolador precisa de 5 volts. Para o motor, a alimentação deve estar de acordo com o tipo utilizado. Lembrando que um circuito PWM podem gerar interferências muito fortes e os microcontroladores são sensíveis a estas interferências. Separar a alimentação ajudará a impedir os efeitos destas interferências.
O PROGRAMA
O programa foi desenvolvido utilizando a Linguagem Assembly Microchip e compilado no MPASM Microchip (http://www.microchip.com). Para grava-lo você poderá utilizar o projeto do gravador PROGPICII, presente neste site ou qualquer outro que você disponha, desde que para microcontroladores PIC. Através do set de instruções detalhado na segunda parte da teoria também oferecida neste site, você poderá estudar e compreender melhor o funcionamento do programa. O código fonte foi ricamente comentado, para demonstrar o seu funcionamento. Eu não vou "pegar na sua mão" para guiá-lo. Estudar é preciso e o "caminho das pedras" já foi dado!
Código fonte – PWM_CTRL.ASM
|
;**************************************************************
;* Controle PWM para motores DC ;* ;* Marcio Jose Soares - 01/10/2002 ;************************************************************** ; ;************************************************************** ;definições do programa ;************************************************************** radix dec ;padrao->valores decimal include <P16F84A.INC> ;inclue arquivo __CONFIG _CP_OFF & _PWRTE_OFF & _WDT_OFF & _XT_OSC ;configura bits PICRES equ 0x00 ;endereço de reset PICINT equ 0x04 ;endereço de interrupções PICRAM equ 0x0C ;endereço da RAM MOTOR equ 0 ;i/o do motor CHV1 equ 1 ;i/o da chave para aumentar a velocidade do motor CHV2 equ 2 ;i/o da chave para diminuir a velocidade do motor LED equ 3 ;i/o do LED MAX equ 0x59 ;valor máximo para PWM MIN equ 0X0C ;valor mínimo para PWM ; ;************************************************************** ;variaveis do programa ;************************************************************** org PICRAM T1 res 1 ;variável para tempo T2 res 1 ;variável para tempo _TMAX res 1 ;variável para trabalhar tempo máximo _TMIN res 1 ;variável para trabalhar tempo mínimo ; ;************************************************************** ;area do reset ;************************************************************** org PICRES ;reset goto inicio ;desvia do endereco 0x04 - interrupção ; ;************************************************************** ;area das interrupções ;************************************************************** org PICINT ;toda interrupção aponta para este endereço retfie ;retorno de interrupção ; ;************************************************************** ;inicio do programa ;************************************************************** inicio: movlw 0x00 ;ajuste para os bits INTCON movwf INTCON ;desabilita ints clrf PORTA ;limpa portas clrf PORTB bsf STATUS,RP0 ;seleciona banco 1 para options e tris movlw 0x06 ;ajusta os bits em A como saída movwf TRISA ;exceto RA1 e RA2, entrada para chave movlw 0x00 ;ajusta os bits em B como saída movwf TRISB ;não usados bcf STATUS,RP0 ;volta ao banco 0... (padrão do reset) movlw MAX ;move valor para _TMAX ->70ms movwf _TMAX movlw MIN ;move valor para _TMIN ->10ms movwf _TMIN ; ;************************************************************** ;loop principalo do programa ;************************************************************** loop: call TECLA ;verifica Tecla PWM: bsf PORTA,MOTOR ;liga pulso call TMIN ;aguarda bcf PORTA,MOTOR ;desliga pulso call TMAX ;aguarda goto loop ; ;************************************************************** ;subrotina para testar tecla ;************************************************************** TECLA: nop ;perde 3 ciclos nop nop btfss PORTA,CHV2 ;testa chave 2 goto TC2 ;pressionada nop ;perde 3 ciclos nop nop btfss PORTA,CHV1 ;testa chave 1 goto TC1 ;pressionada goto TC3 ;nenhuma chave pressionada ; ;************************************************************** ;subrotina para incrementar velocidade ;************************************************************** TC1: nop ;perde 3 ciclos nop ; nop movf _TMIN,W ;carrega com valor mínimo atual andlw 0xFF ;faz and com W xorlw MAX ;faz xor com W, se = , bit Z em STATUS = 1 btfss STATUS,Z ;testa resultado, zero valor mínimo = máximo goto TC1_1 ;incrementa velocidade bsf PORTA,LED ;velocidade no máximo, não incrementa mais goto TC3 ;e liga led TC1_1: incf _TMIN,F ;incrementa registro decf _TMAX,F ;decrementa registro goto TC3 ;volta ;************************************************************** ;subrotina para decrementar velocidade ;************************************************************** TC2: nop ;perde 3 ciclos nop nop movf _TMIN,W ;carrega com valor mínimo atual andlw 0xFF ;faz and com W xorlw MIN ;faz xor com W, se = , bit Z em STATUS = 1 btfss STATUS,Z ;testa se resultado zero goto TC2_1 ;decrementa velocidade goto TC3 ;velocidade no mínimo, não decrementa mais TC2_1: decf _TMIN,F ;incrementa registro incf _TMAX,F ;decrementa registro bcf PORTA,LED ;desliga led TC3: bcf STATUS,Z ;garante bit Z como 0 return ;retorna ; ;************************************************************** ;subrotina para temporização do PWM ;************************************************************** TMIN: movf _TMIN,W ;carrega W com _TMIN movwf T1 ;carrega T1 com W goto car_1 ;inicia temporização TMAX: movf _TMAX,W ;carrega W com _TMAX movwf T1 ;carrega T1 com W goto car_1 ;inicia temporização ; ;************************************************************** ;subrotina para temporização do PWM ;************************************************************** car_1: movlw 0xff ;carrega W com 255 movwf T2 ;carrega T2 com 255 dec_1: decfsz T2,1 ;decrementa T2 goto dec_1 ;255 x T1 vezes decfsz T1,1 ;decrementa T1 goto car_1 ;volta a carregar T2 retlw 0x00 ;retorna ; ;************************************************************** ;fim do programa ;************************************************************** end |
CONCLUSÃO
O microcontrolador PIC16F84 apesar de “pequeno” demonstra grandes possibilidades. O controle de cargas com PWM é só uma delas. Muito se pode conseguir fazer com um microcontrolador PIC. Tudo depende apenas da sua criatividade e força de vontade.
|
Material para o circuito PWM Semicondutores 1 –
PIC16F84A/4MHz – microcontrolador Resistores (1/8 Watt, 5%) 1 –
10K – Marrom, preto e laranja
Capacitores 1 –
100nF – cerâmico
Diversos 3 -
chaves “push-botton”
|
Copyright deste conteúdo reservado para Márcio José Soares e protegido pela Lei de Direitos Autorais LEI N° 9.610, de 19 de Fevereiro de 1998. É estritamente proibida a reprodução total ou parcial do conteúdo desta página em outros pontos da internet, livros ou outros tipos de publicações comerciais ou não, sem a prévia autorização por escrito do autor.